Schumann Oliver, M. Sc.
Forschung
- Pfadplanung unter kinematischen Beschränkungen (Hybrid A*, RRT*, ...)
- Robuste Trajektorienplanung unter der Berücksichtigungen von Unsicherheiten
- Kombination von Graph- oder Samplingbasierten Pfadplanern mit optimierungsbasierten Trajektorienplanern
- Projekt U-Shift II.
Abschlussarbeiten (Bachelor & Master) und HiWis:
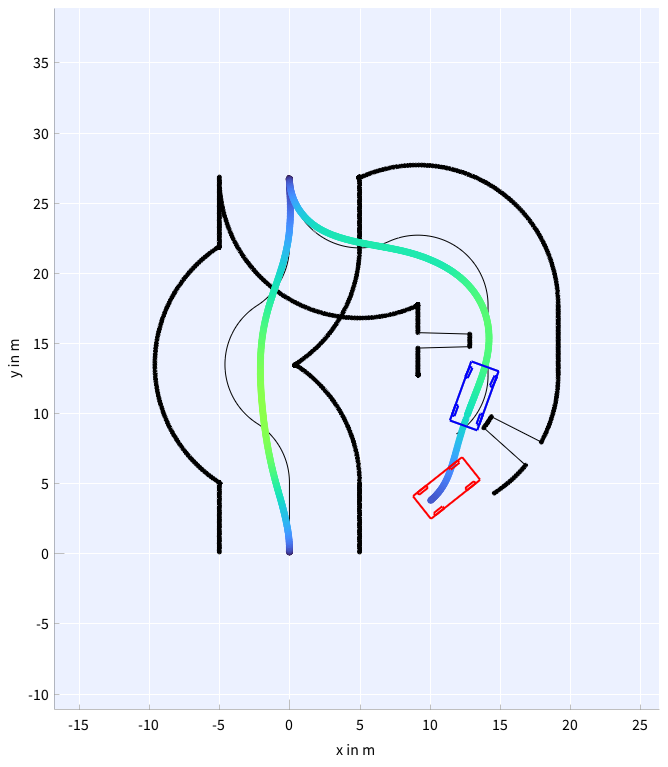
- Robuste Trajektorienplanung unter Unsicherheiten zur Aufnahme einer Kapsel
- GPU basierte Beschleunigung von existierenden Pfadplanungsalgorithmen
(z. B. Beschleunigung des Hybrid A* Algorithmus mittels GPU basierter Suche und Kollisionschecks) - eigene Themen immer gerne auf Anfrage
Lebenslauf
- Wissenschaftlicher Mitarbeiter am Institut für Mess-, Regel- und Mikrotechnik an der Universität Ulm (seit 2022)
- Informationssystemtechnik (M. Sc.) an der Universität Ulm (2021)
- Auslandssemester an der École nationale d'Ingénieurs de Brest, Frankreich (2018)
- Elektrotechnik und Informationstechnik (B. Eng.) an der Technischen Hochschule Ulm (2019)
Lehre
- seit SoSe 2022: Übungsleiter in Digitale Regelungen

Publikationen
2025
4.
Schumann,
Oliver;
Buchholz,
Michael;
Dietmayer,
Klaus
Dynamic Objective MPC for Motion Planning of Seamless Docking Maneuvers
2025 IEEE Intelligent Vehicles Symposium (IV)
Seite 132-139
2025
132-139
Dynamic Objective MPC for Motion Planning of Seamless Docking Maneuvers
2025 IEEE Intelligent Vehicles Symposium (IV)
Seite 132-139
2025
132-139
| DOI: | 10.1109/IV64158.2025.11097771 |
3.
Buchholz,
Michael;
Wodtko,
Thomas;
Schumann,
Oliver;
Authaler,
Dominik
The Automation Concept of the U-Shift II Vehicle
2025 Stuttgart International Symposium, SAE Technical Paper 2025-01-0281,
2025
The Automation Concept of the U-Shift II Vehicle
2025 Stuttgart International Symposium, SAE Technical Paper 2025-01-0281,
2025
| DOI: | 10.4271/2025-01-0281 |
2024
2.
Schumann,
Oliver;
Wodtko,
Thomas;
Buchholz,
Michael;
Dietmayer,
Klaus
Self-Assessment of Evidential Grid Map Fusion for Robust Motion Planning
2024 IEEE 27th International Conference on Intelligent Transportation Systems (ITSC), Seite 2584-2591
2024
Self-Assessment of Evidential Grid Map Fusion for Robust Motion Planning
2024 IEEE 27th International Conference on Intelligent Transportation Systems (ITSC), Seite 2584-2591
2024
| DOI: | 10.1109/ITSC58415.2024.10919943 |
| Datei: | https://arxiv.org/abs/2409.20286 |
2023
1.
Schumann,
Oliver;
Buchholz,
Michael;
Dietmayer,
Klaus
Efficient Path Planning in Large Unknown Environments with Switchable System Models for Automated Vehicles
26th IEEE International Conference on Intelligent Transportation Systems, Seite 2466-2472
2023
Efficient Path Planning in Large Unknown Environments with Switchable System Models for Automated Vehicles
26th IEEE International Conference on Intelligent Transportation Systems, Seite 2466-2472
2023
| DOI: | 10.1109/ITSC57777.2023.10422264 |
| Datei: | https://arxiv.org/abs/2310.06974 |
