Informationsfusion
Der Fokus des Instituts hinsichtlich der Informationsfusion liegt auf der Erforschung von probabilistischen Methoden und Ansätzen zu denen die Bayes-Theorie und deren Erweiterung, die Dempster-Shafer-Theorie, gehören. Diese Forschung ermöglicht die Darstellung der fusionierten Informationen in einem zentralen Umgebungsmodell in dem ein Teilaspekte die dynamische rasterbasierte Karte (Dynamic-Grid-Map) Forschungsschwerpunkt ist.
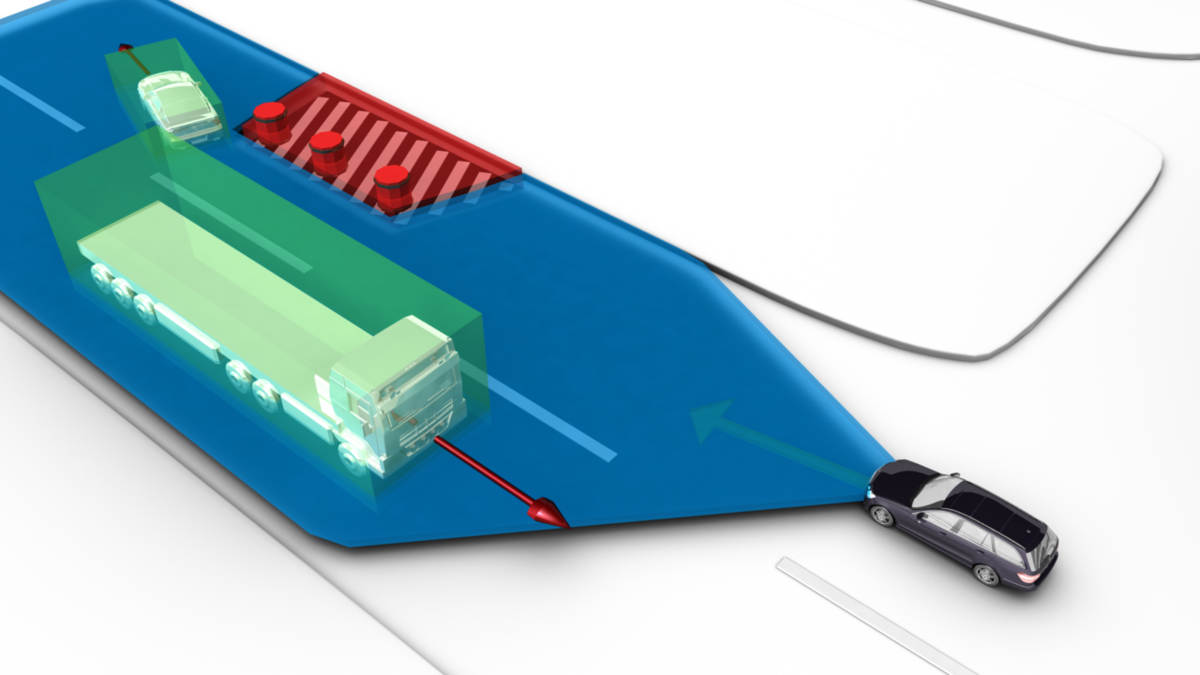
Bei der Informationsfusion werden die von verschiedenen Quellen, beispielsweise Kamera, Lidar- und Radar-Sensoren, kommunizierten Daten methodisch kombiniert um neues und präziseres Wissen über Messwerte und Ereignisse zu gewinnen. Ein solch robustes Ergebnis wird durch Überschneidung der Sensorerfassungsbereiche (Field of Views) und die somit entstehenden Redundanzen der Informationsquellen realisiert. Zusätzlich zu den Sensordaten kann Kontextwissen von z.B. digitalen Karten oder C2X-Kommunikationen zum Informationsgewinn einbezogen werden.
Eine weitere Qualitätssteigerung des Informationsfusionsprozesses wird durch die zeitliche Filterung der Informationen unter Berücksichtigung von Mess- und Prozessmodellen erzielt, d.h. die methodische Verwendung von a-priori Wissen in situationsabhängigen Problemstellungen wird ermöglicht. Wichtig ist hierbei, kontinuierlich die aktuelle Genauigkeit und Zuverlässigkeit der Ergebnisse anhand statistischer Größen wie Kovarianzen zu bewerten.
Die Informationsfusion verbessert u.a. die Ergebnisse des Multi-Objekt-Trackings. Des Weiteren wird mithilfe der Vielzahl an Sensoren am Versuchsfahrzeug eine 360°-Umgebungserfassung realisiert.