Ziele des VA-Morph Projekts
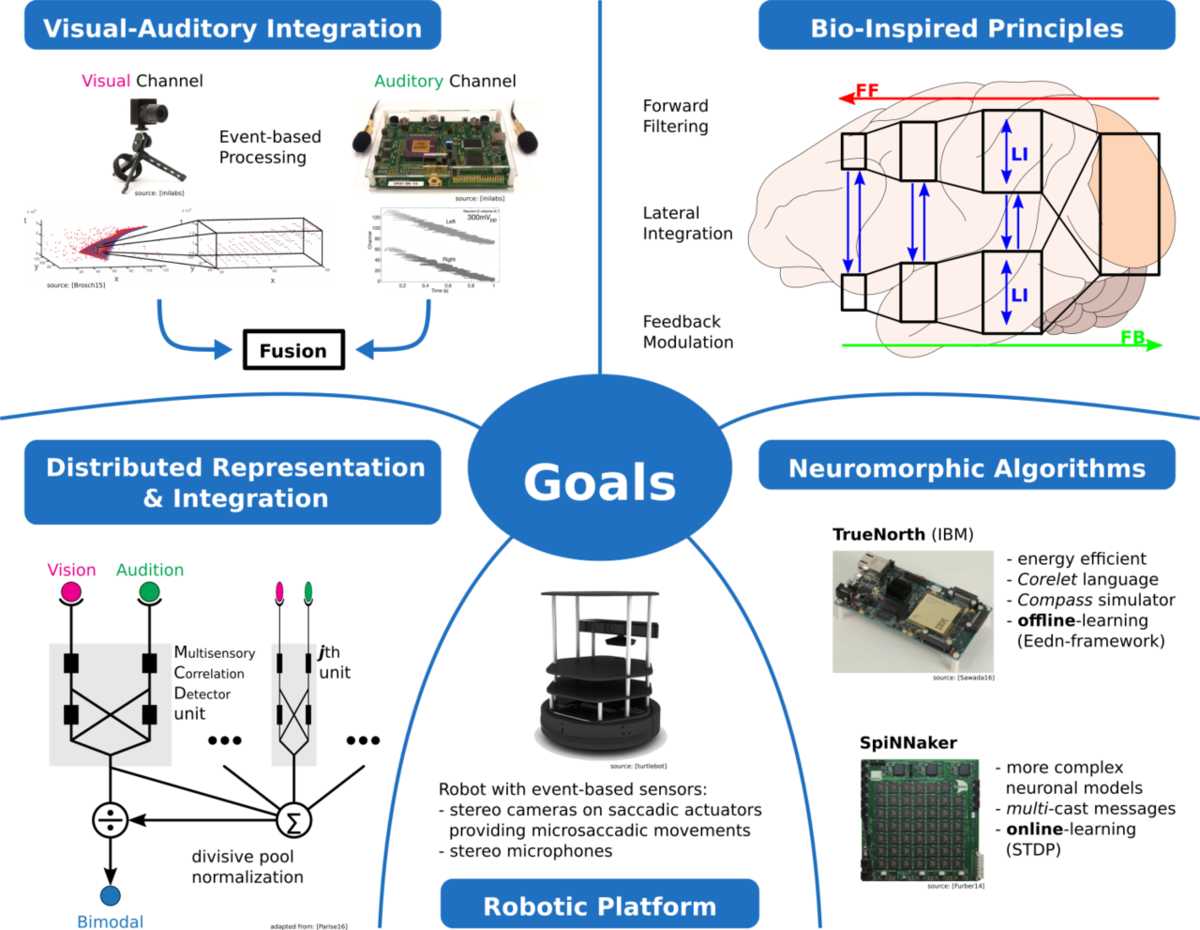
- Die ereignisbasierte Analyse aktiv generierter visueller Information mit Hilfe von mikro-sakkadischen Augenbewegungen
- Die ereignisbasierte Analyse und das Lernen von auditiven Repräsentationen für die räumliche Wahrnehmung während der Eigenbewegung
- Die visuell-auditorische Integration räumlicher Information und das Lernen von multi-sensorischen Abbildungen zur Bewegungssteuerung
- Die Entwicklung biologisch-plausibler neuromorpher Algorithmen für die multisensorische Analyse räumlicher Information
- Die effiziente Steuerung eines autonomen Roboters mittels integrierter visueller und auditiver Sensorinformation