Die Schriftenreihe dient zur Publikation von am Institut entstandenen Dissertationen. Je nach Wunsch der Autorin bzw. des Autors wird der jewelige Band online und/oder als Print-on-Demand-Exemplar veröffentlicht. Online-Exemplare werden über das institutionelle Repositorium der Universität Ulm (OPARU) als PDF veröffentlicht, die jeweligen Bände sind über einen Link hinter der jeweligen ISBN unten in der Liste direkt erreichbar. Gedruckte Exemplare können beim Institut erworben werden (Preis auf Anfrage).
Schriftenreihe
Holzbock, Adrian
2025, Band 56
Titel
Efficient human gesture recognition in automated driving
Klimke, Marvin
2025, Band 55
Titel
Multi-Agent Planning for Cooperative Urban Automated Driving
ISBN
Print: 978-3-941543-90-4
Online: 978-3-941543-91-1
Hornauer, Julia
2024, Band 54
Titel
Image-based uncertainty estimation and out-of-distribution detection
Henning, Matti
2024, Band 53
Titel
Situation-aware environment perception using a multi-layer attention map
Schmidt, Julian
2024, Band 52
Titel
Behavior prediction for autonomous driving using graph neural networks
Forstenhäusler, Marc

Herrmann, Martin
2024, Band 50
Titel
Multi-Sensor Multi-Object Tracking for Connected Automated Driving with Distributed Sensors
Schreiber, Marcel
2024, Band 49

Titel
Dynamic Occupancy Grid Mapping with Recurrent Neural Networks for Autonomous Driving
Rexin, Nils
2024, Band 48
Titel
Objektzustandsschätzung unter Verwendung einer dynamischen Belegungsrasterkarte
Horn, Markus
2024, Band 47
Titel
Extrinsic Calibration for Intelligent Vehicles and Infrastructur Sensors Using Dual Quaternions
ISBN
Print: 978-3-941543-75-1
Online: 978-3-941543-76-8
Gies, Fabian
2023, Band 46
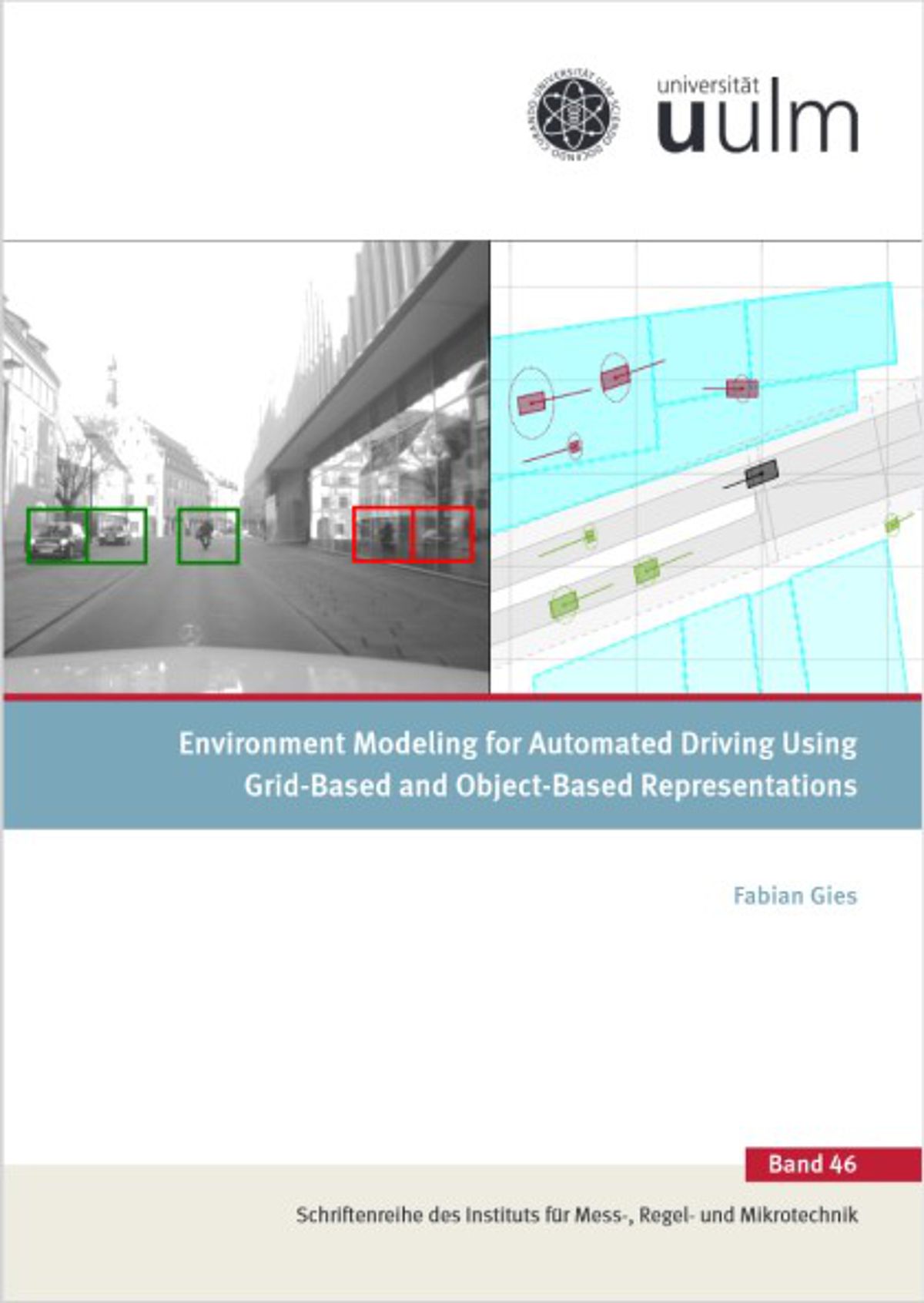
Titel
Environment modeling for automated driving using grid-based and object-based representations
ISBN
Online: 978-3-941543-73-7
Speidel, Oliver
2023, Band 45
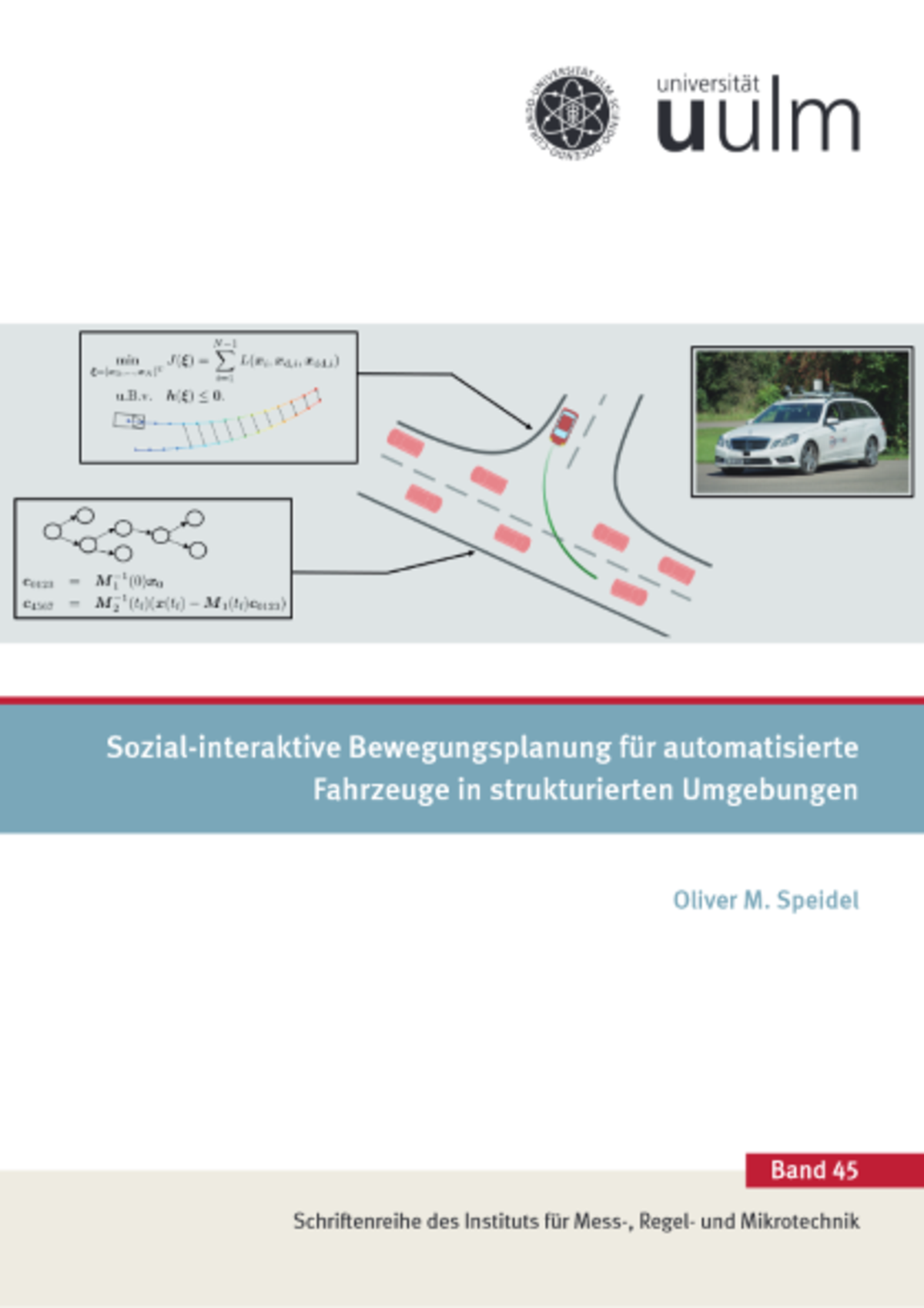
Titel
Sozial-interaktive Bewegungsplanung für automatisierte Fahrzeuge in strukturierten Umgebungen
ISBN
Print: 978-3-941543-71-3
Online: 978-3-941543-72-0
Engel, Nico
2023, Band 44
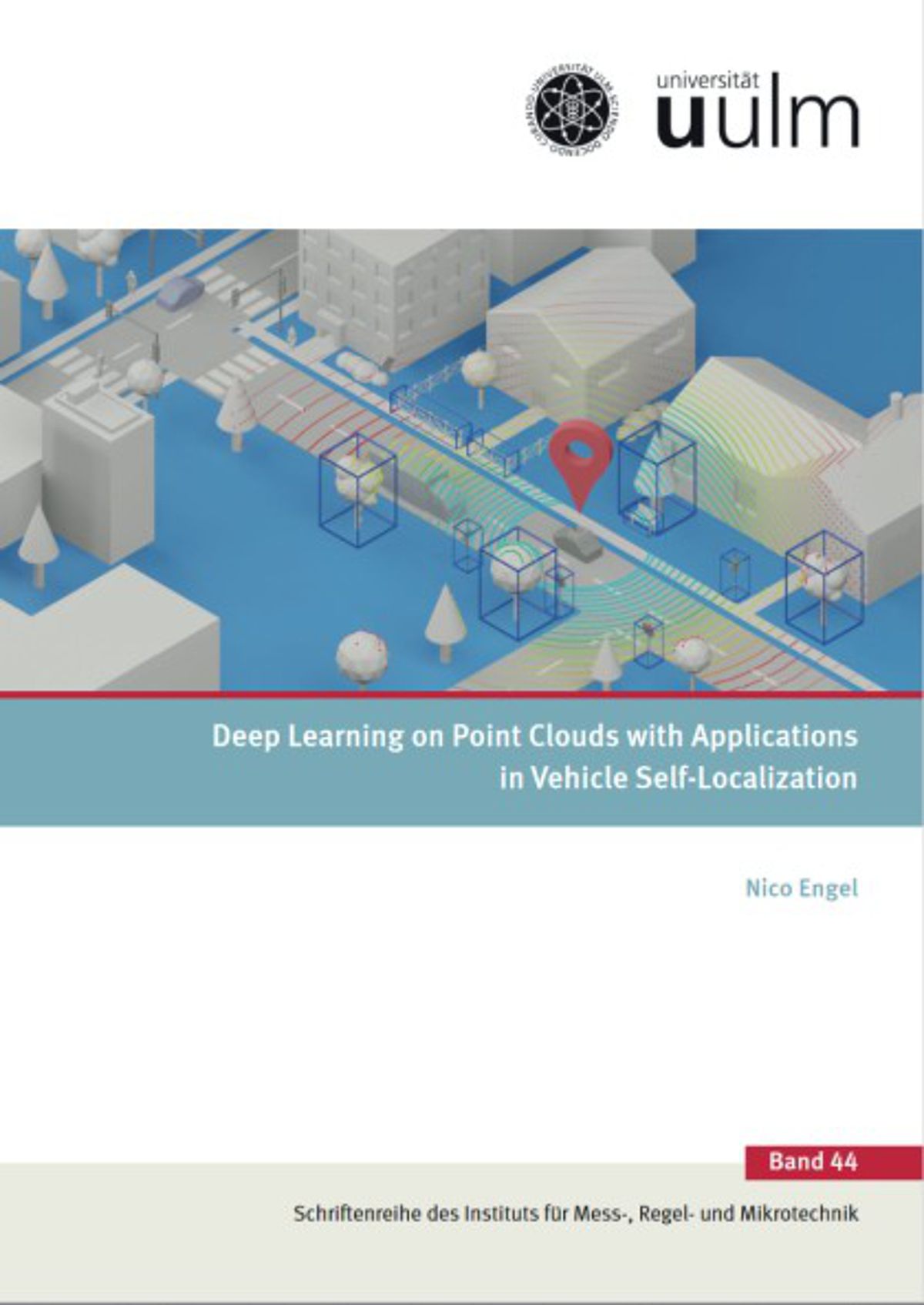
Titel
Deep Learning on Point Clouds with Applications in Vehicle Self-Localization
ISBN
Print: 978-3-941543-69-0
Online: 978-3-941543-70-6
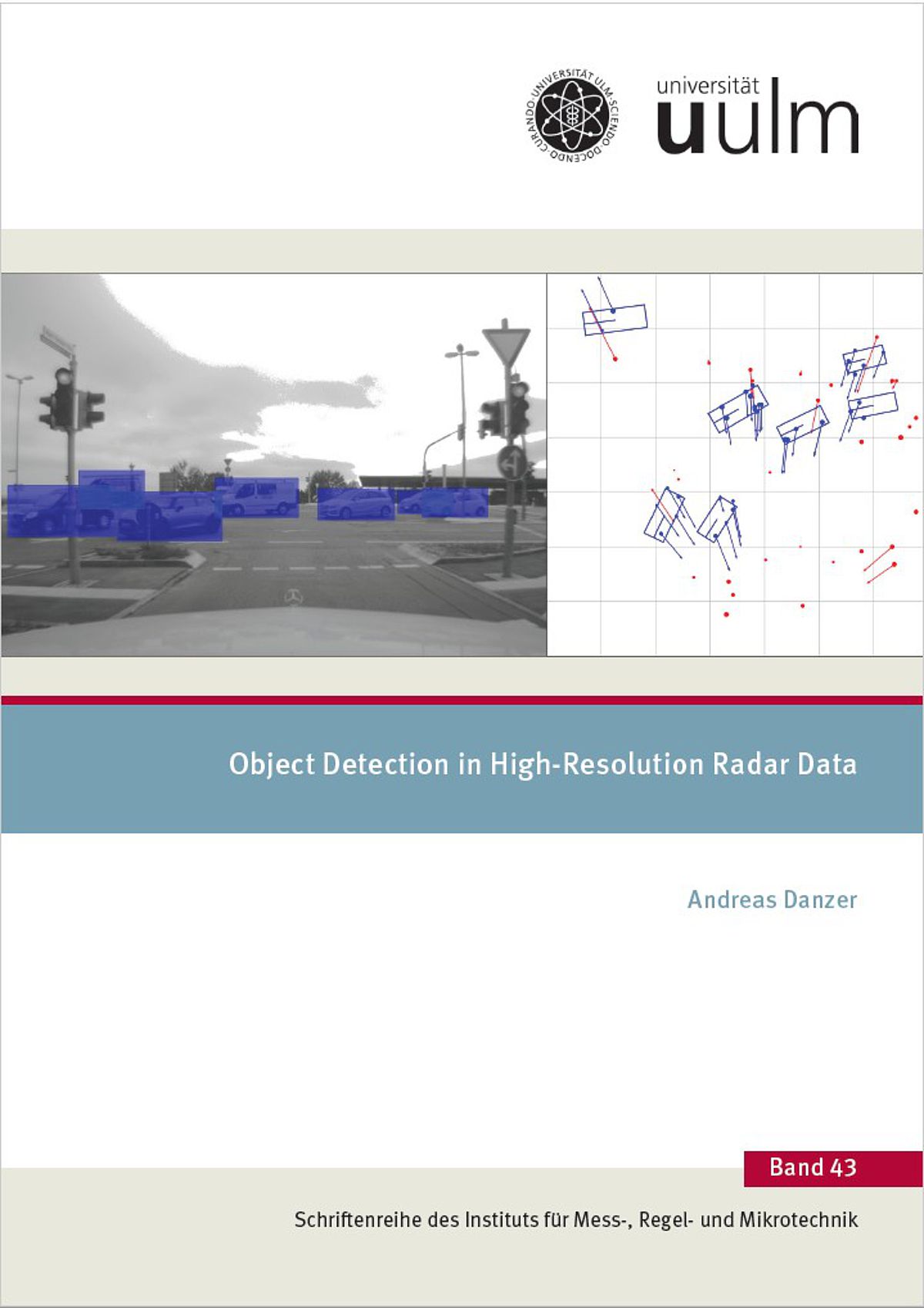
Danzer, Andreas
Pfeuffer, Andreas
2023, Band 42
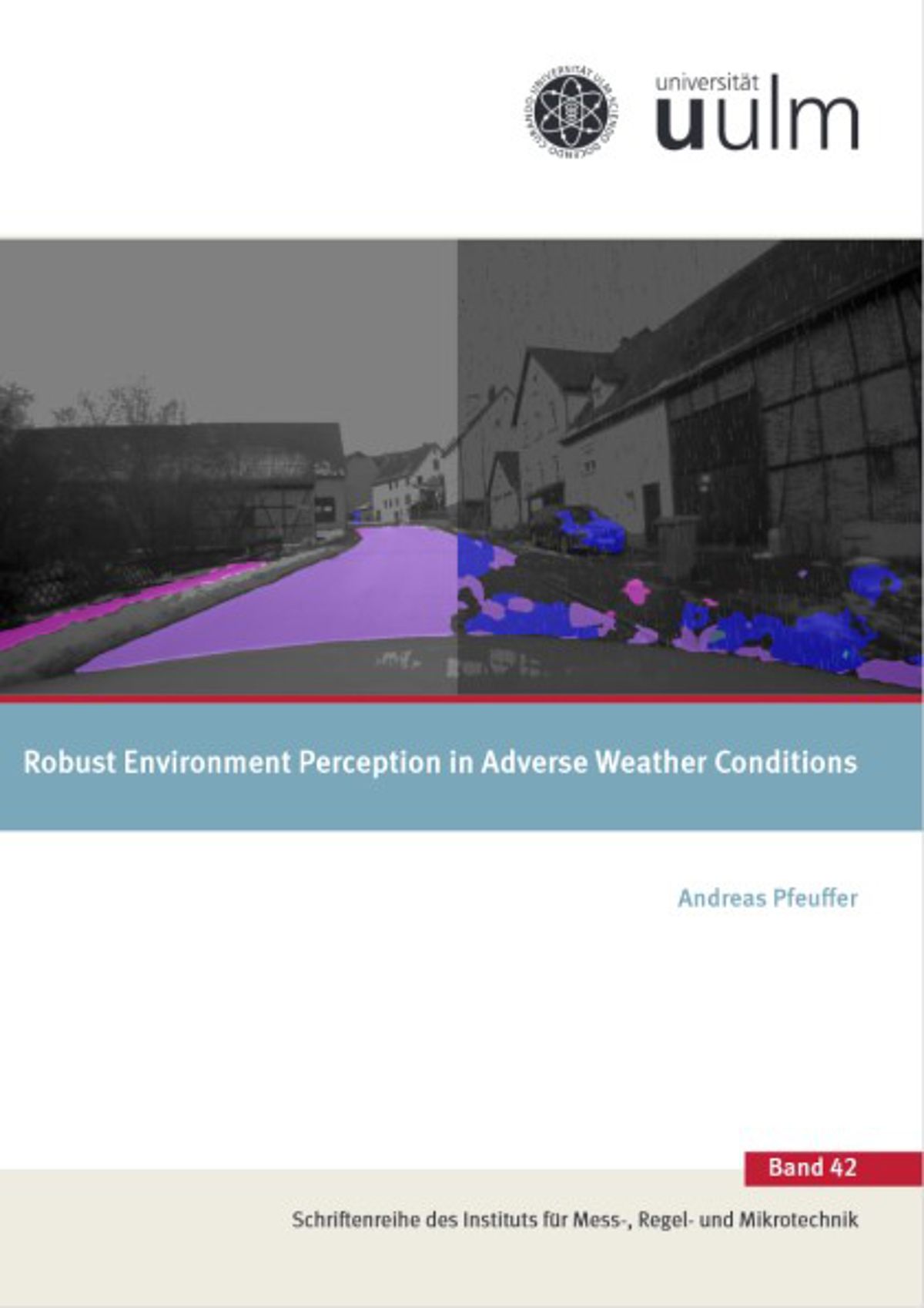
Titel
Robust Environment Perception in Adverse Weather Conditions
ISBN
Print: 978-3-941543-66-9
Online: 978-3-941543-67-6
Müller, Johannes
2022, Band 41
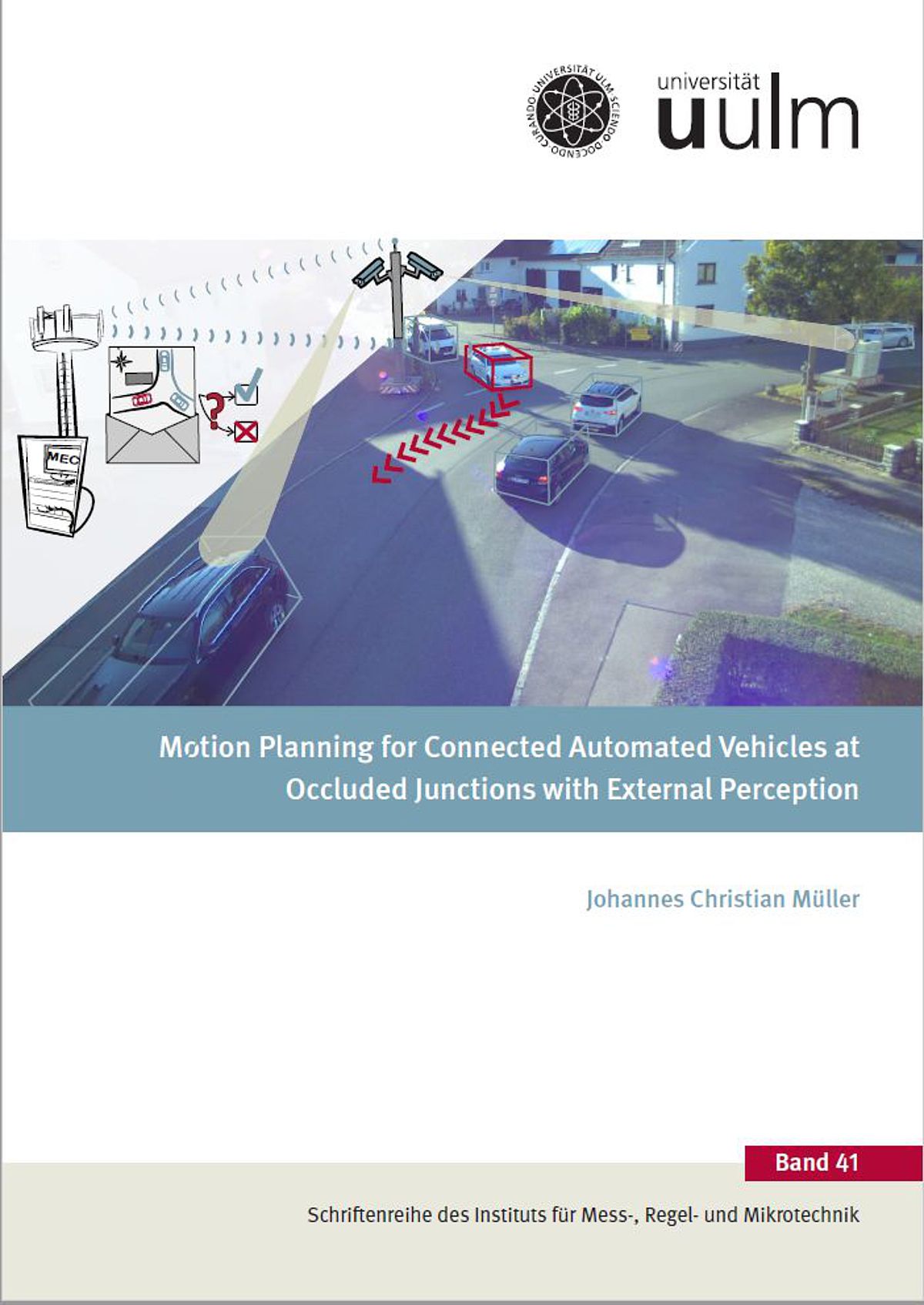
Titel
Motion planning for connected automated vehicles at occluded junctions with external perception
ISBN
Print: 978-3-941543-63-8
Online: 978-3-941543-64-5
Chen, Meng
2021, Band 40
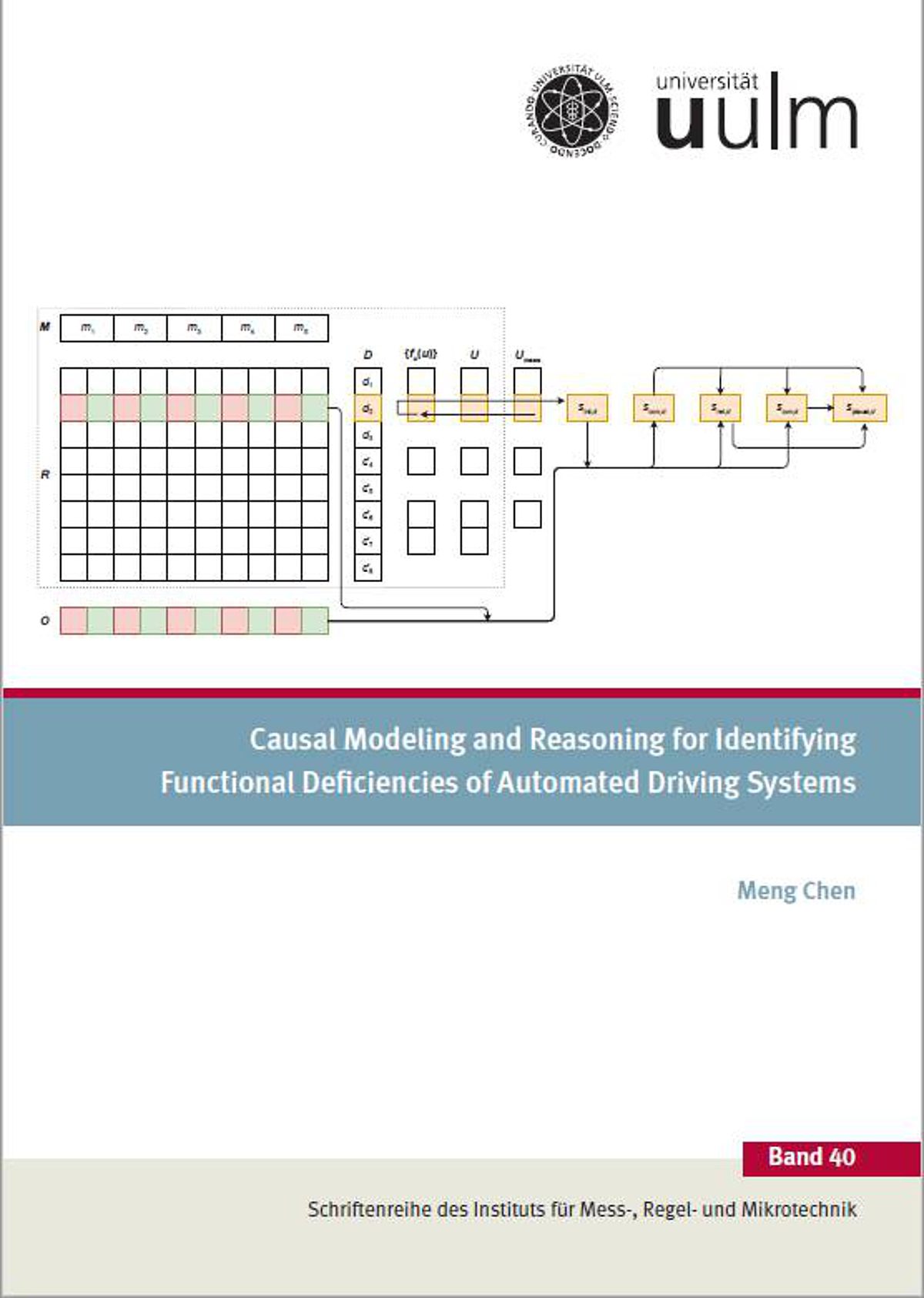
Titel
Causal modeling and reasoning for identifying functional deficiencies of automated driving systems
ISBN
Online: 978-3-941543-62-1
Müller, Julian
2021, Band 39
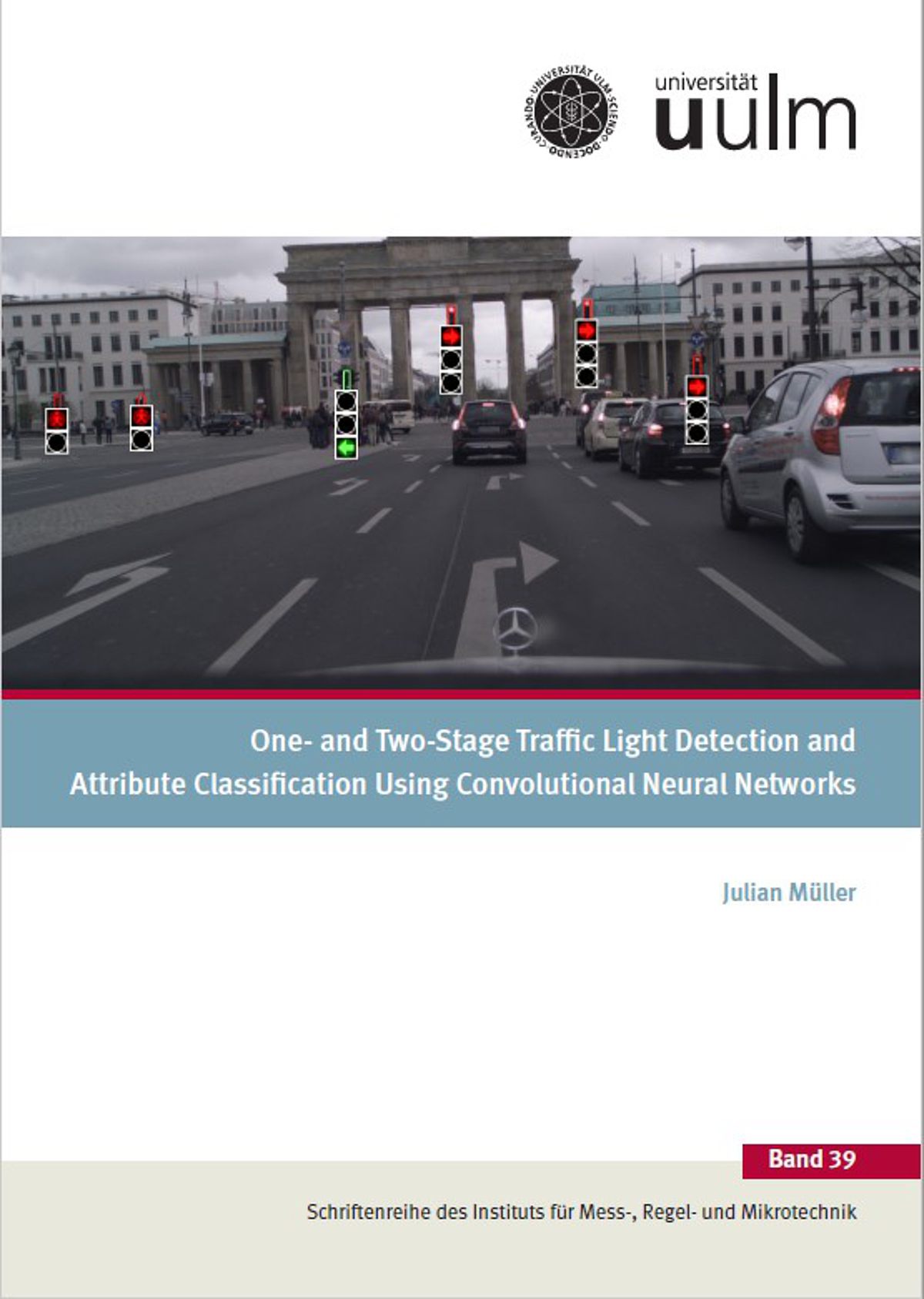
Titel
One- and two-stage traffic light detection and attribute classification using convolutional neural networks
ISBN
Print: 978-3-941543-60-7
Online: 978-3-941543-61-4
Graf, Maximilian
2021, Band 38
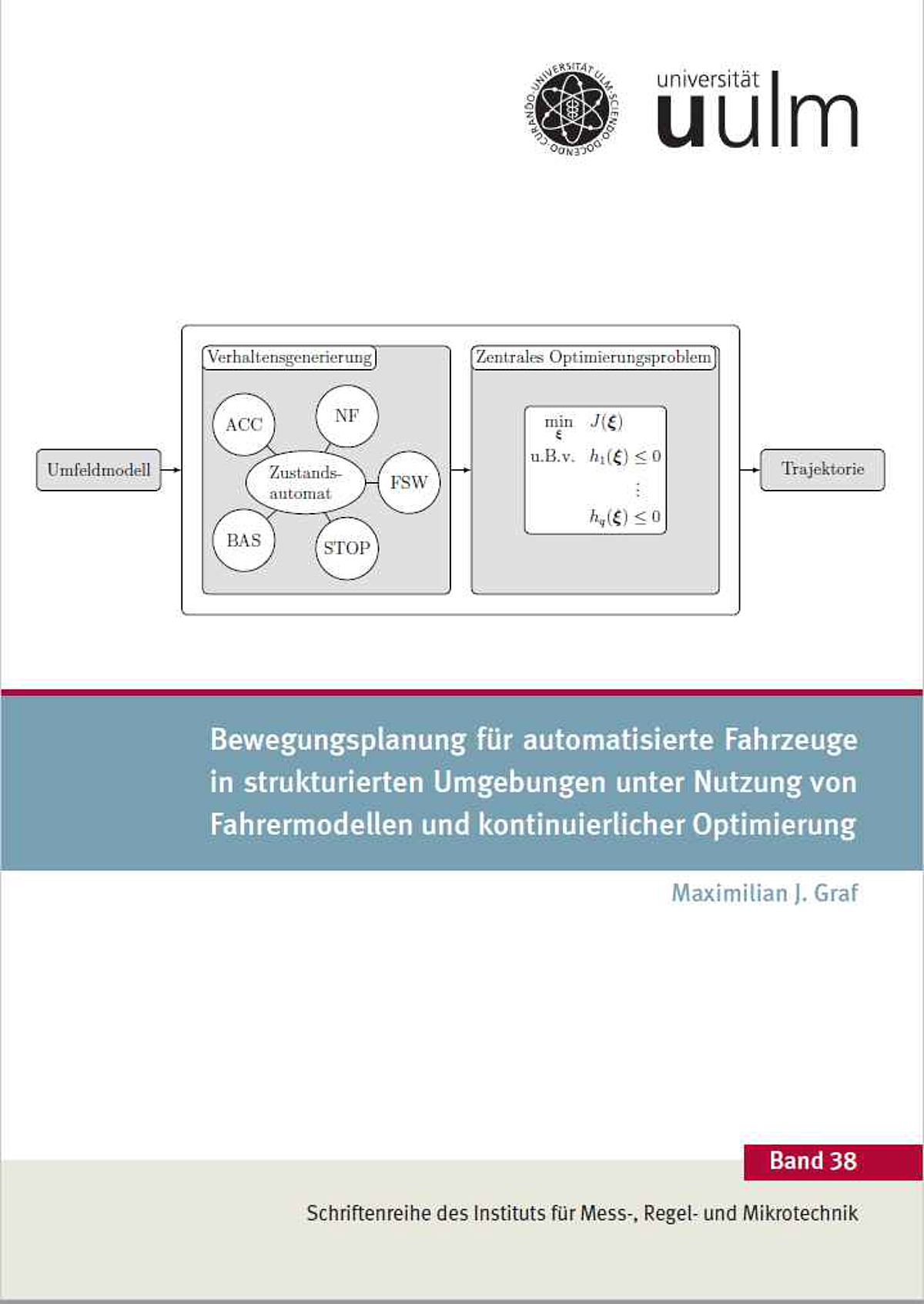
Titel
Bewegungsplanung für automatisierte Fahrzeuge in strukturierten Umgebungen unter Nutzung von Fahrermodellen und kontinuierlicher Optimierung
ISBN
Print: 978-3-941543-58-4
Online: 978-3-941543-59-1
Feng, Di
2021, Band 37
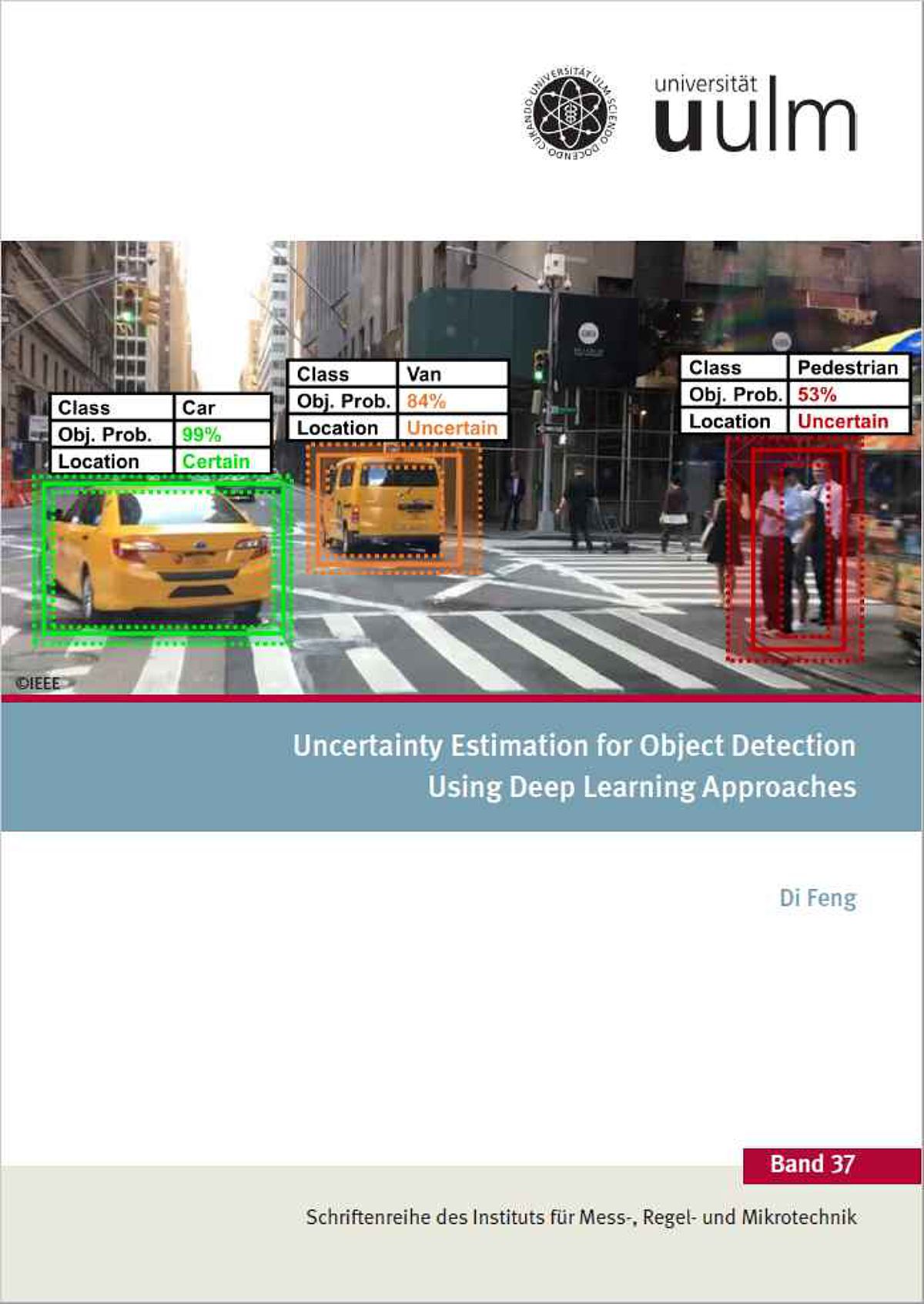
Titel
Uncertainty Estimation for Object Detection Using Deep Learning Approaches
ISBN
Print: 978-3-941543-56-0
Online: 978-3-941543-57-7
Gruber, Tobias
2020, Band 36
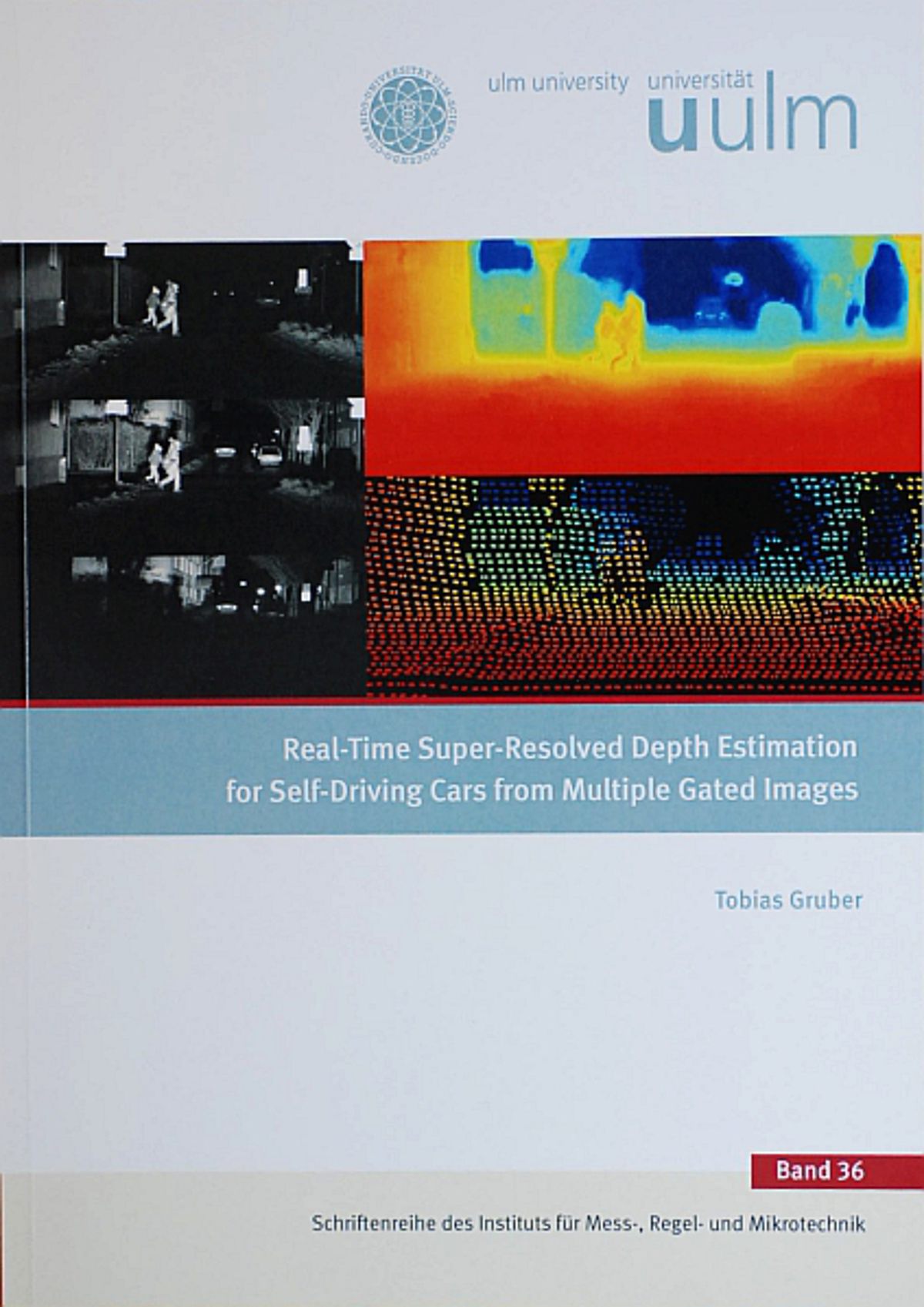
Titel
Real-Time Super-Resolved Depth Estimation for Self-Driving Cars from Multiple Gated Images
ISBN
Print: 978-3-941543-54-6
Online: 978-3-941543-55-3
Strigel, Elias
2020, Band 35
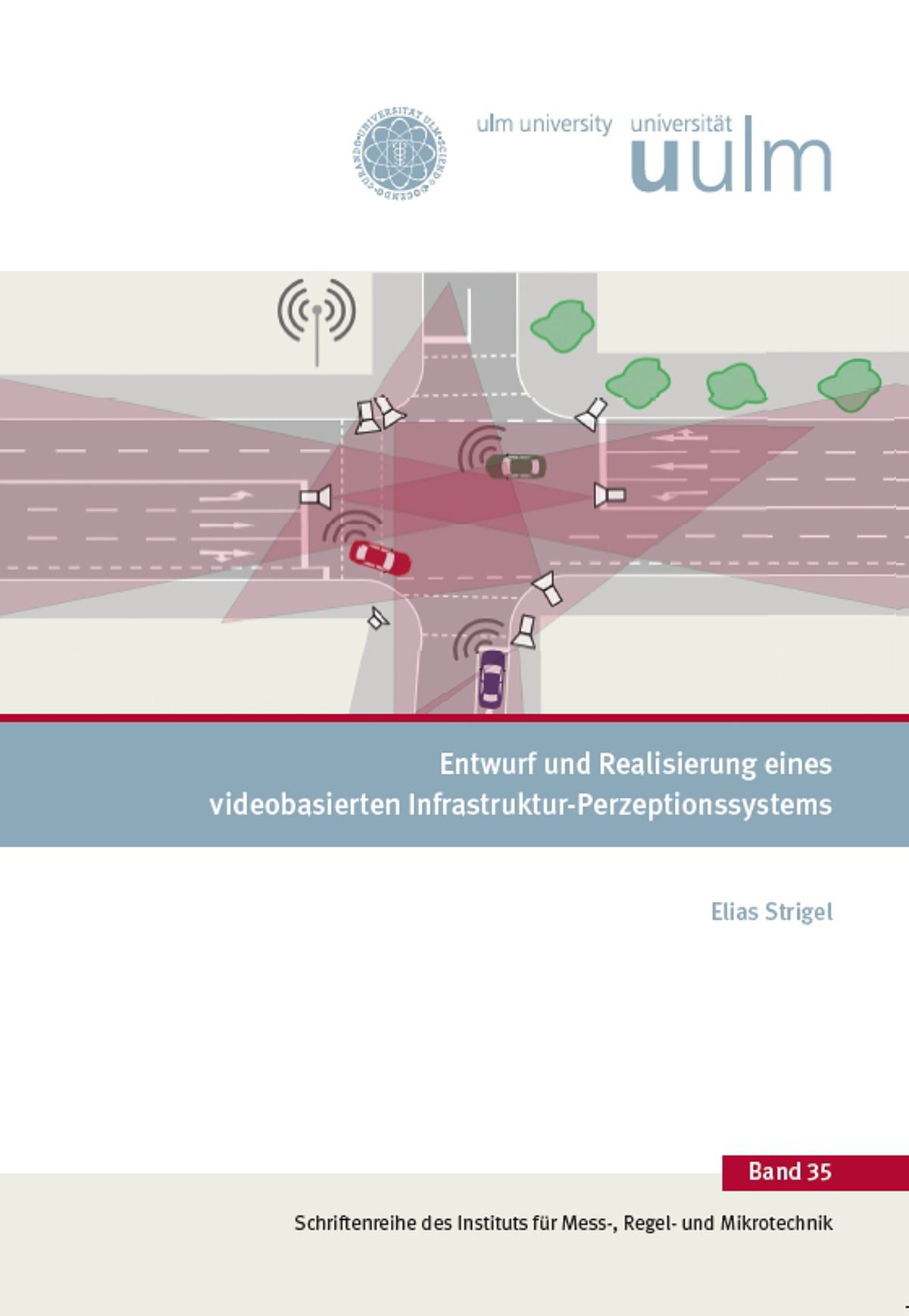
Titel
Entwurf und Realisierung eines videobasierten Infrastruktur-Perzeptionssystems
ISBN
Print: 978-3-941543-53-9
Stumper, Daniel
2020, Band 34
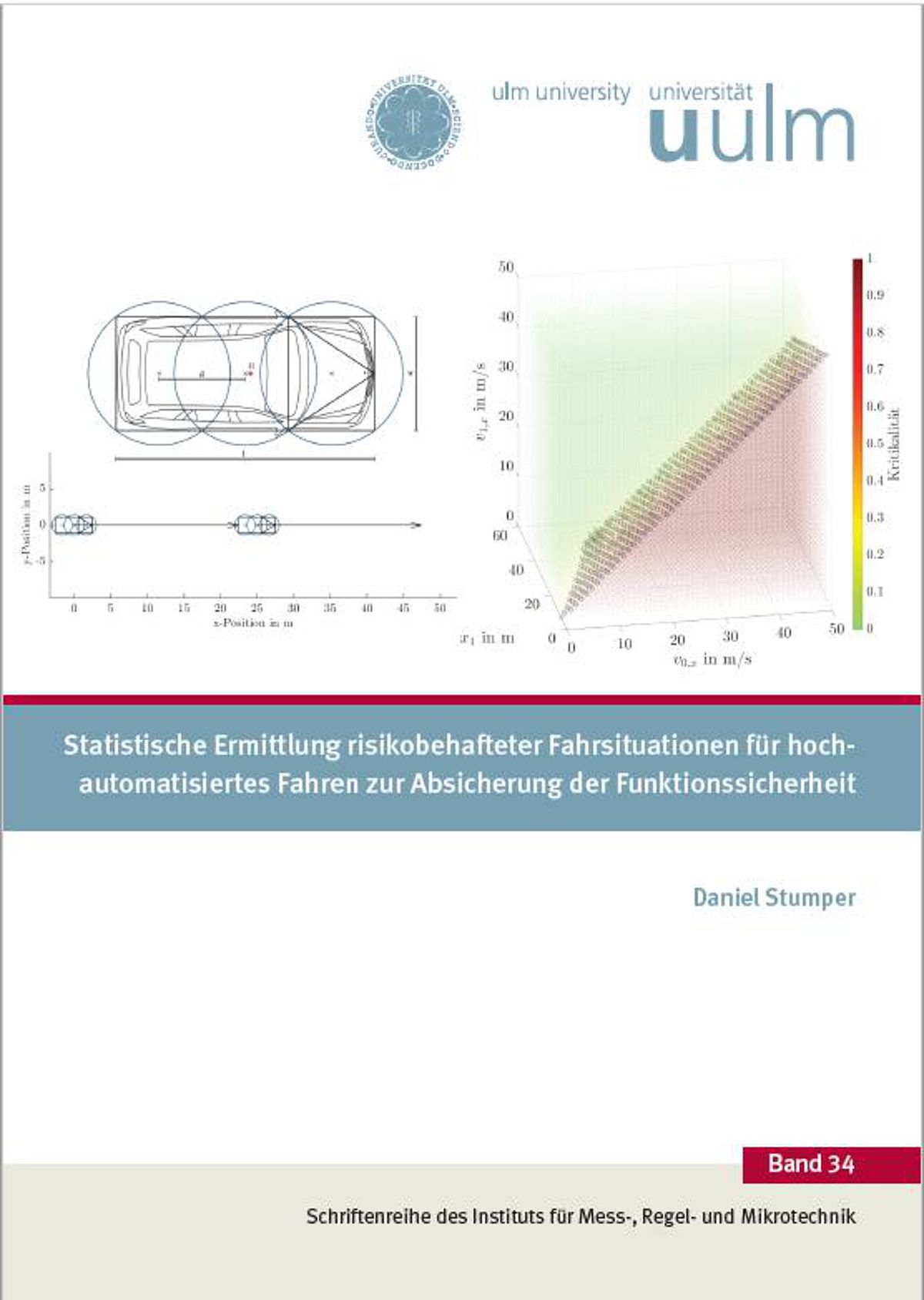
Titel
Statistische Ermittlung risikobehafteter Fahrsituationen für hochautomatisiertes Fahren zur Absicherung der Funktionssicherheit
ISBN
Online: 978-3-941543-52-2
Bächle, Thomas
2020, Band 33
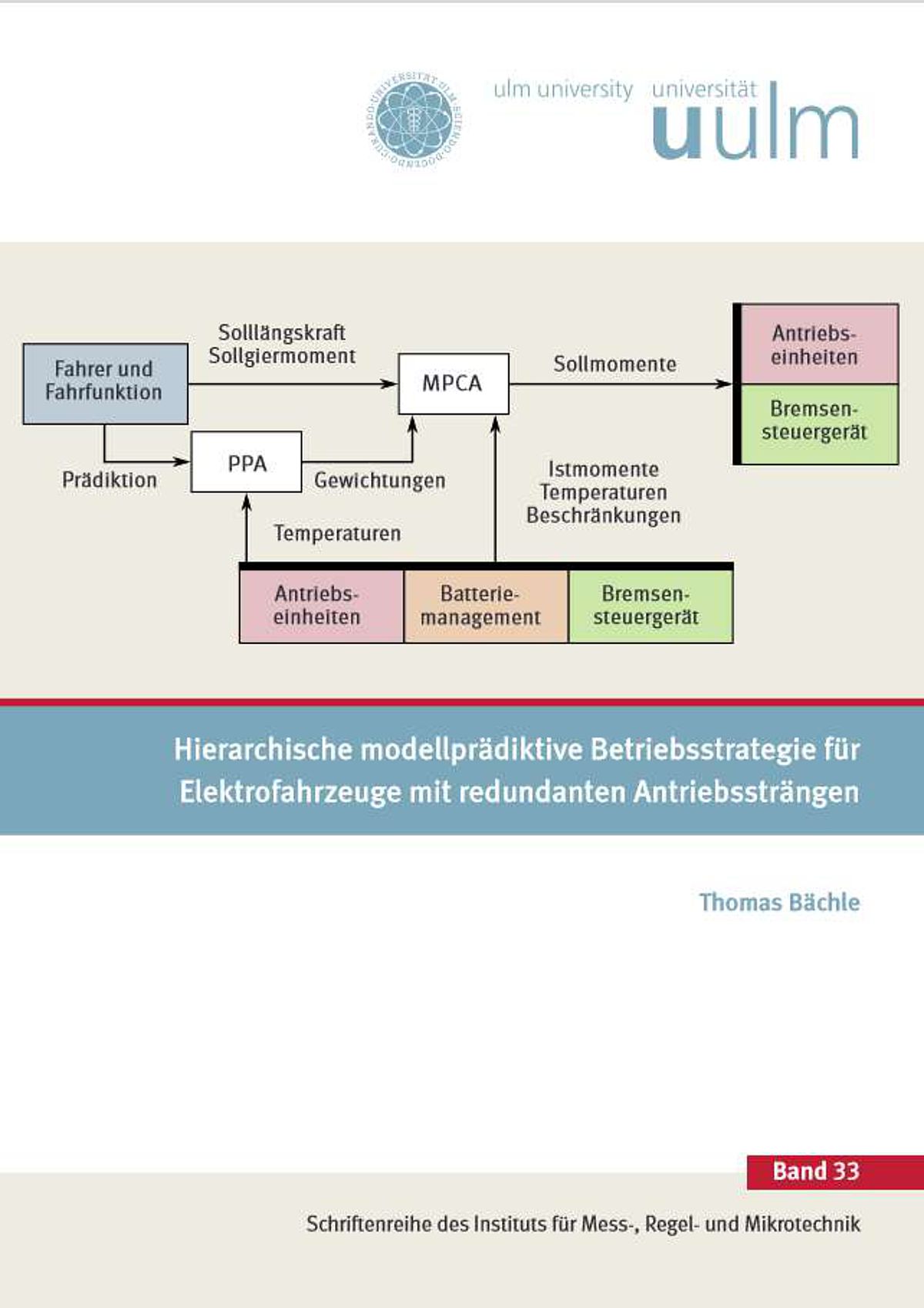
Titel
Hierarchische modellprädiktive Betriebsstrategie für Elektrofahrzeuge mit redundanten Antriebssträngen
ISBN
Print: 978-3-941543-50-8
Online: 978-3-941543-51-5
Fregin, Andreas
2021, Band 32
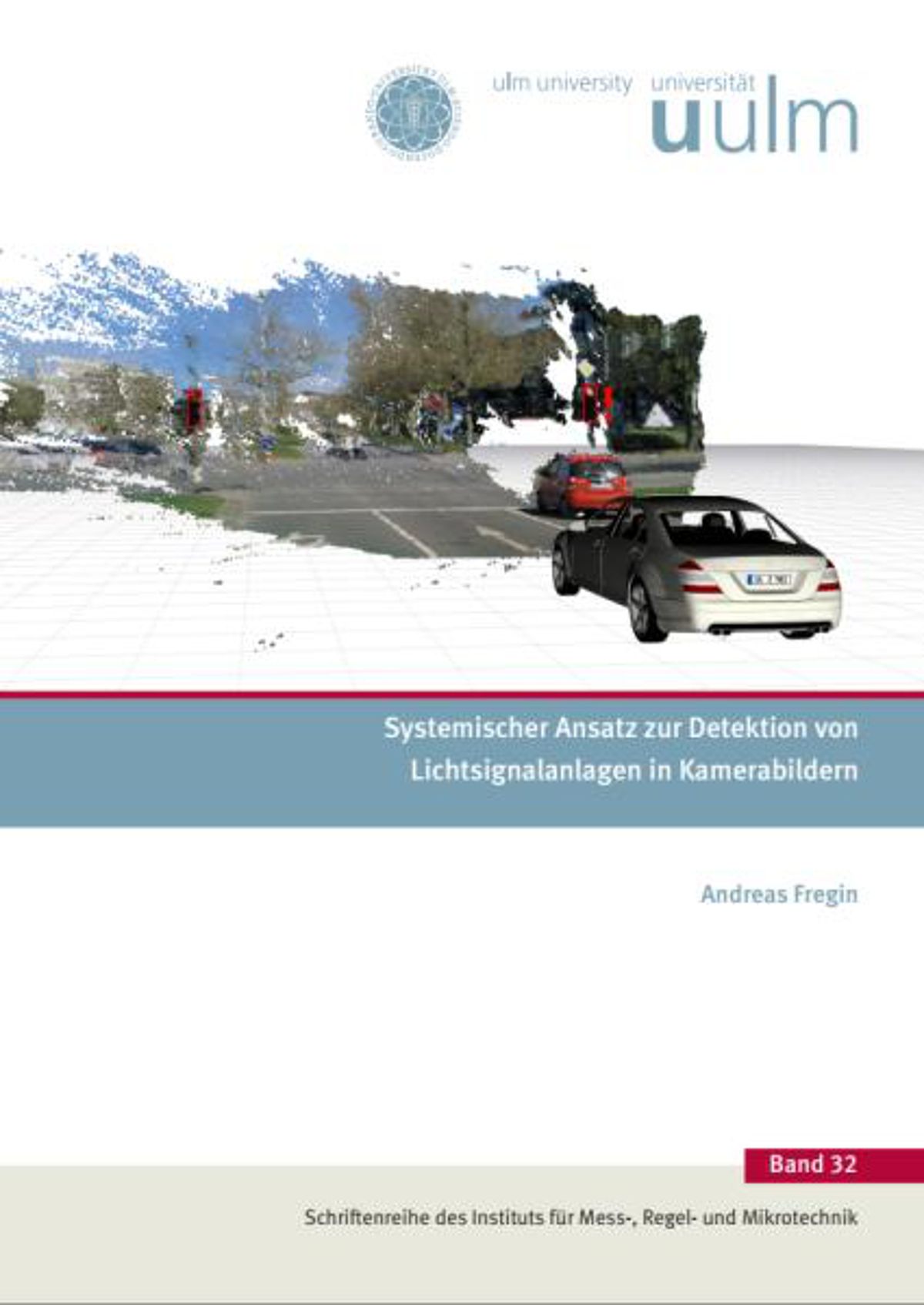
Titel
Systemischer Ansatz zur Detektion von Lichtsignalanlagen in Kamerabildern
ISBN
Online: 978-3-941543-49-2
Hörmann, Stefan
2020, Band 31
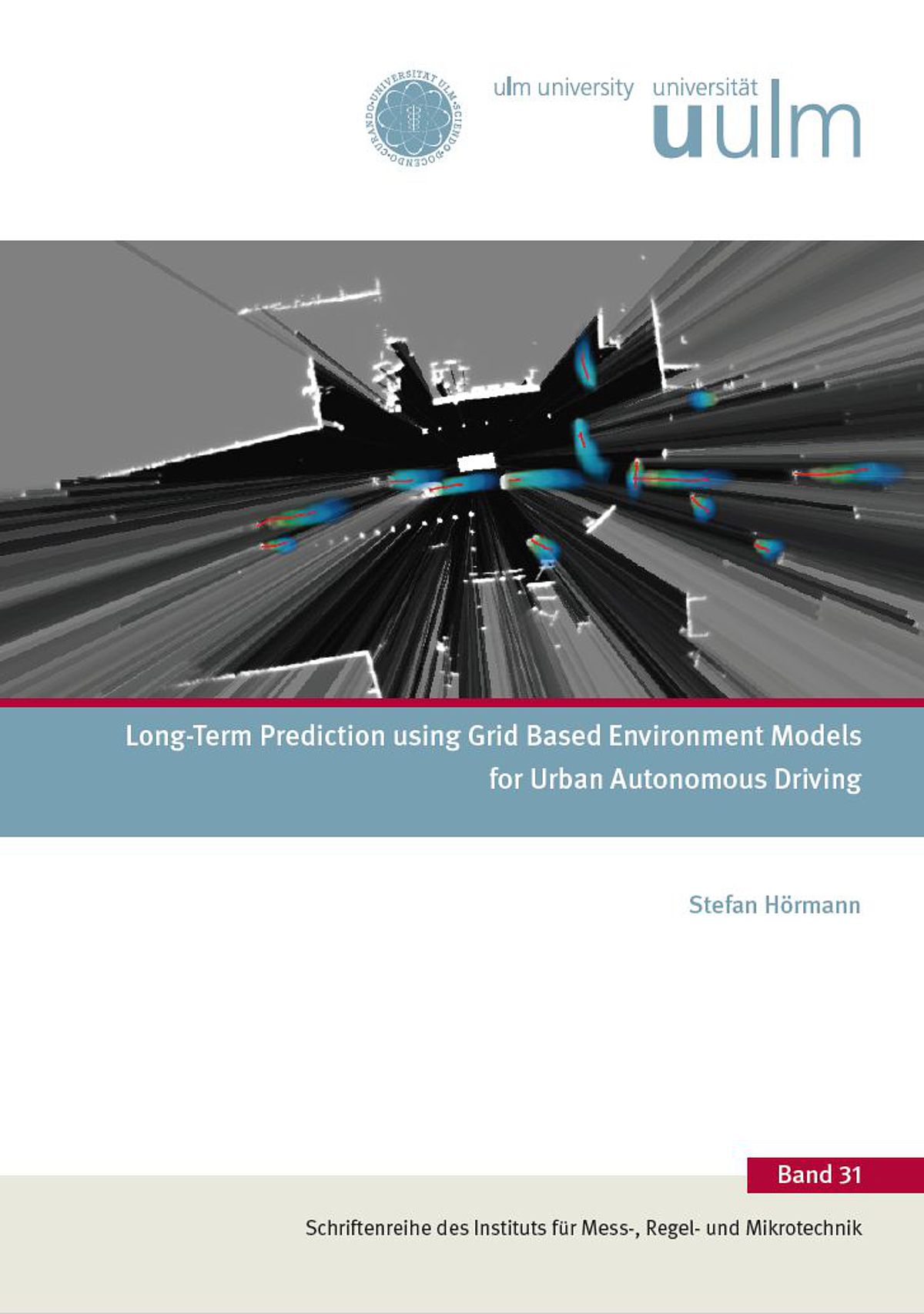
Titel
Long-Term Prediction using Grid Based Environment Models for Urban Autonomous Driving
ISBN
Online: 978-3-941543-48-5
Scheel, Alexander Matthias
2019, Band 30
Titel
Fully Bayesian Vehicle Tracking Using Extended Object Models
ISBN
Print: 978-3-941543-45-4
Online: 978-3-941543-46-1
Klee, Hannes
2019, Band 29
Titel
Optimierte Softwarekomponentenverteilung in bestehenden vernetzten eingebetteten Systemen
ISBN
Online: 978-3-941543-44-7
Barjenbruch, Michael
2019, Band 28

Titel
Methoden zur Steigerung der Auflösung und Robustheit von Automobilradaren
ISBN
Print: 978-3-941543-42-3
Online: 978-3-941543-43-0
Graf-Roch, Regine
2019, Band 27
Titel
Case-Based Reasoning zur Verhaltensprädiktion von Verkehrsteilnehmern
ISBN
Print: 978-3-941543-41-6
Stübler, Manuel
2018, Band 26
Titel
Self-assessing Localization and Long-term Mapping using Random Finite Sets
ISBN
Print: 978-3-941543-39-3
Online: 978-3-941543-40-9
Wilking, Benjamin
2018, Band 25
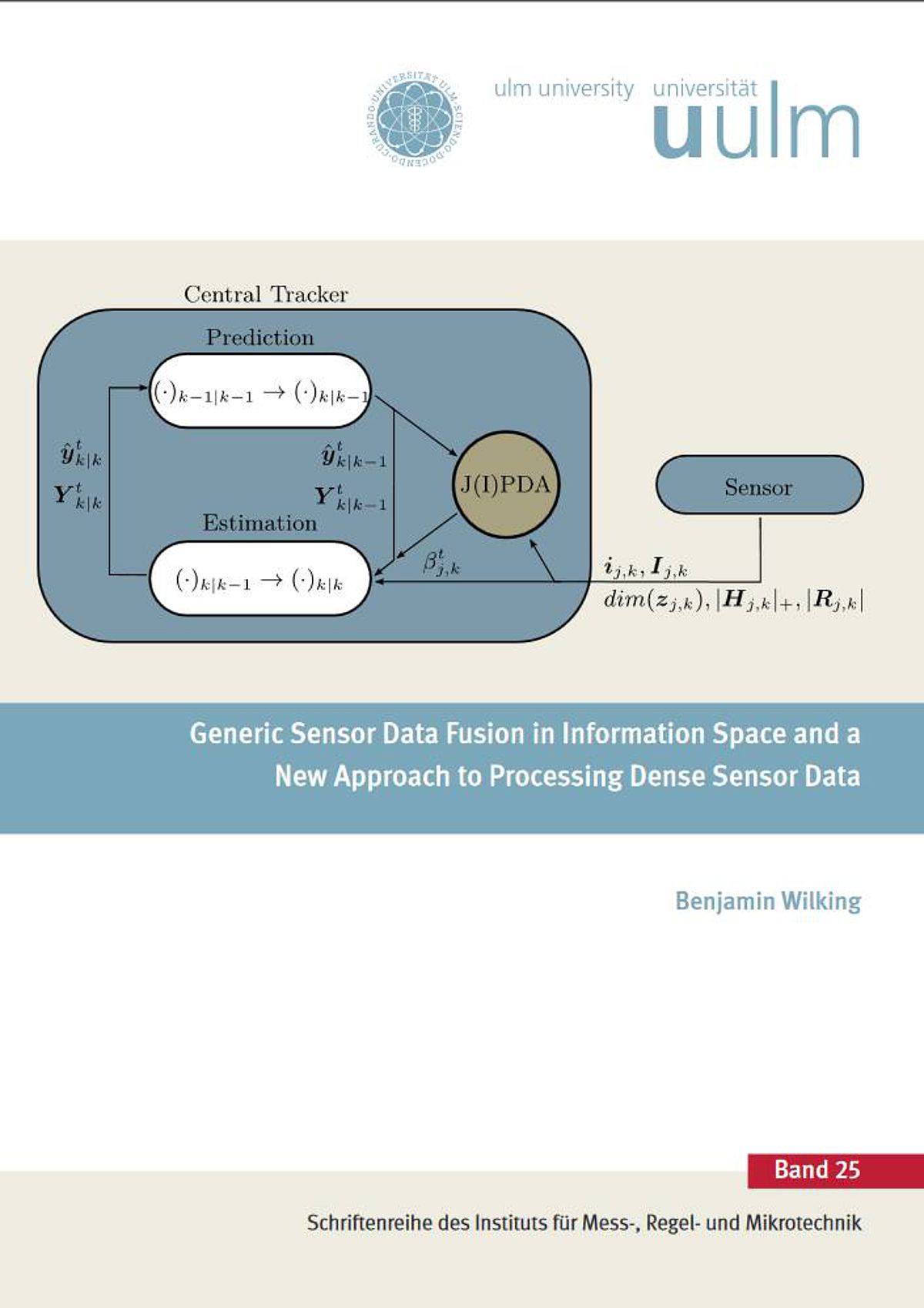
Titel
Generic Sensor Data Fusion in Information Space and a New Approach to Processing Dense Sensor Data
ISBN
Print: 978-3-941543-37-9
Online: 978-3-941543-38-6
Seeliger, Florian
2017, Band 24
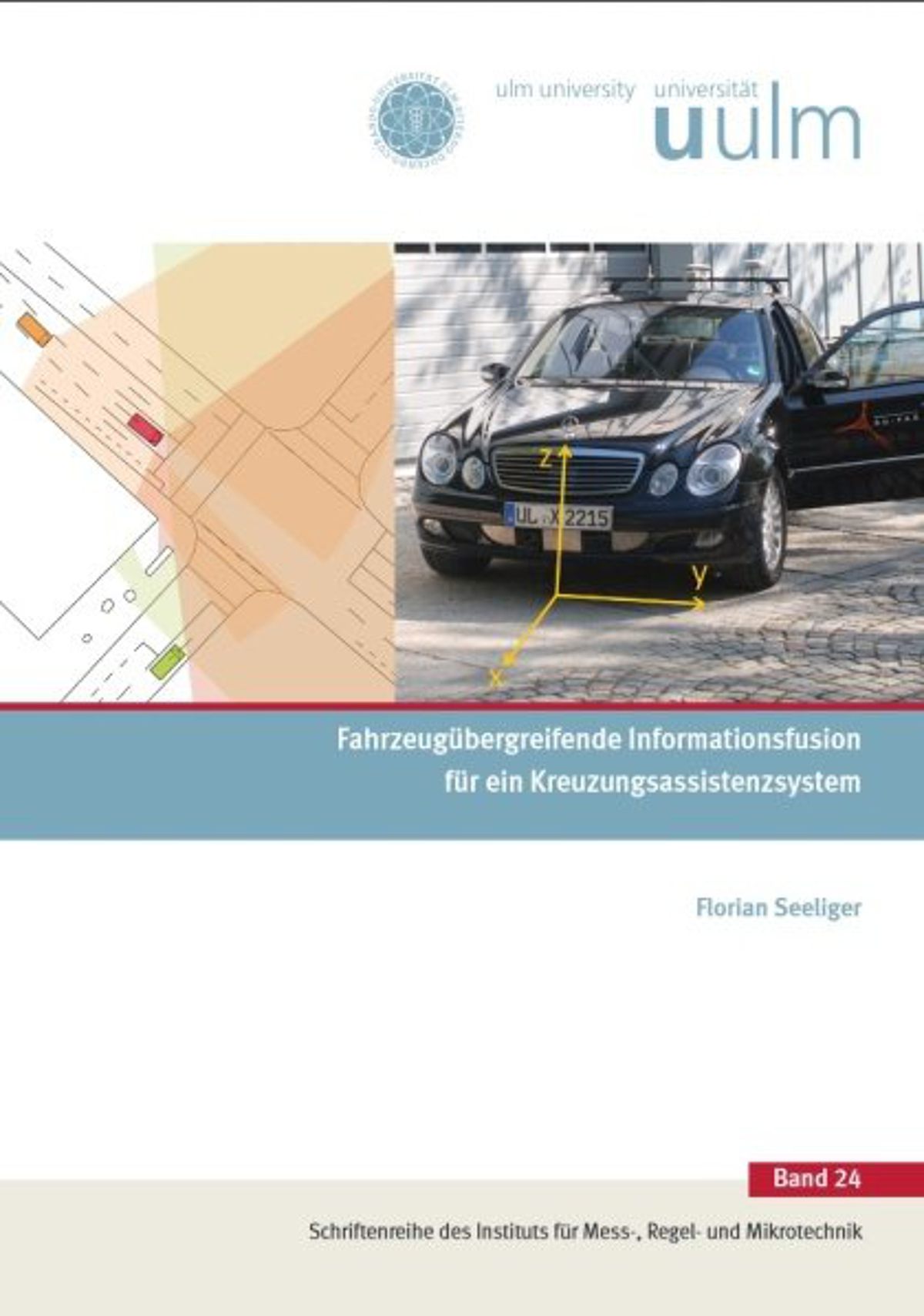
Titel
Fahrzeugübergreifende Informationsfusion für ein Kreuzungsassistenzsystem
ISBN
Print: 978-3-941543-35-5
Online: 978-3-941543-36-2
Sailer, Stefan
2017, Band 23
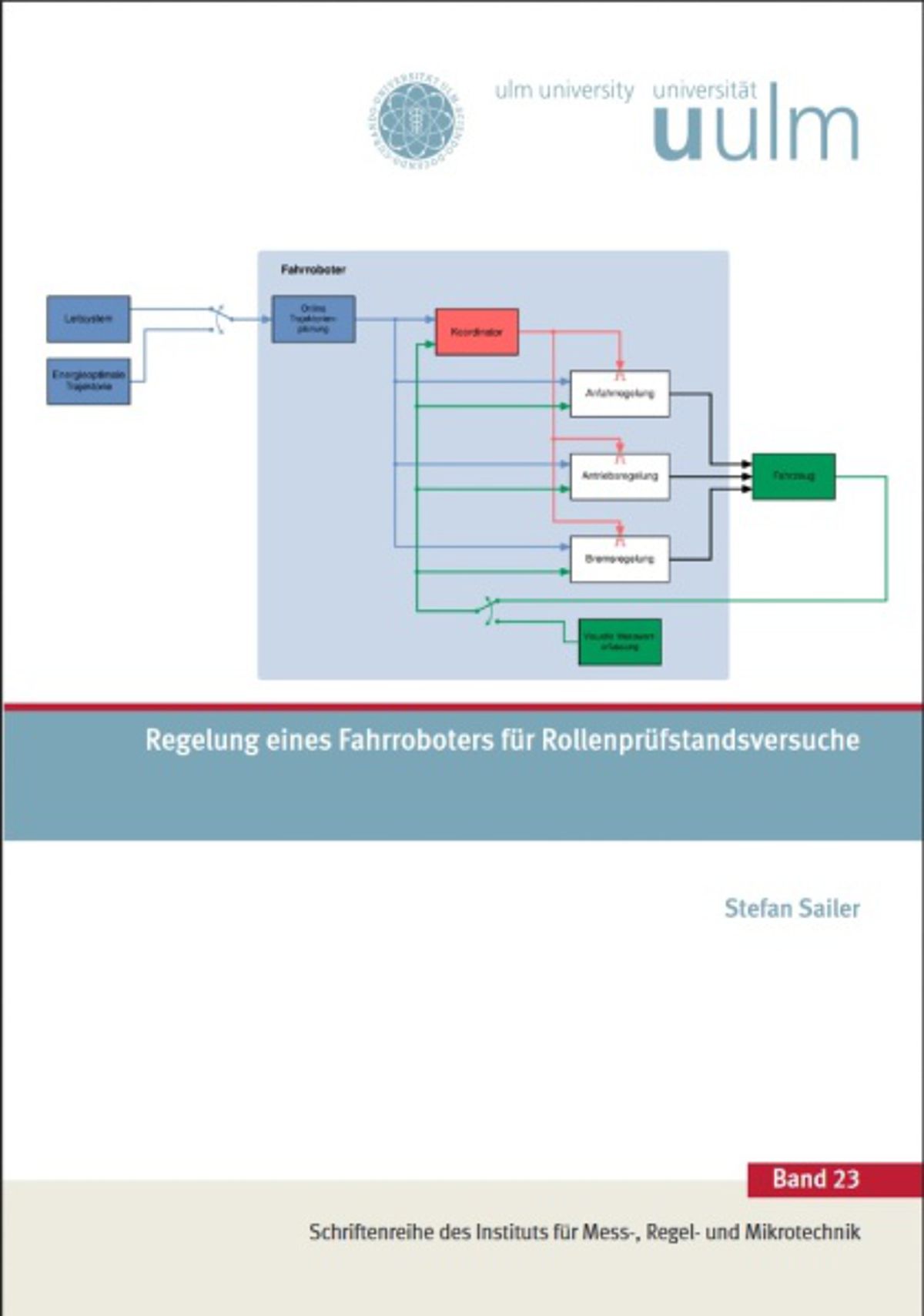
Titel
Regelung eines Fahrroboters für Rollenprüfstandsversuche
ISBN
Print: 978-3-941543-33-1
Online: 978-3-941543-34-8
Henzler, Michael
2017, Band 22
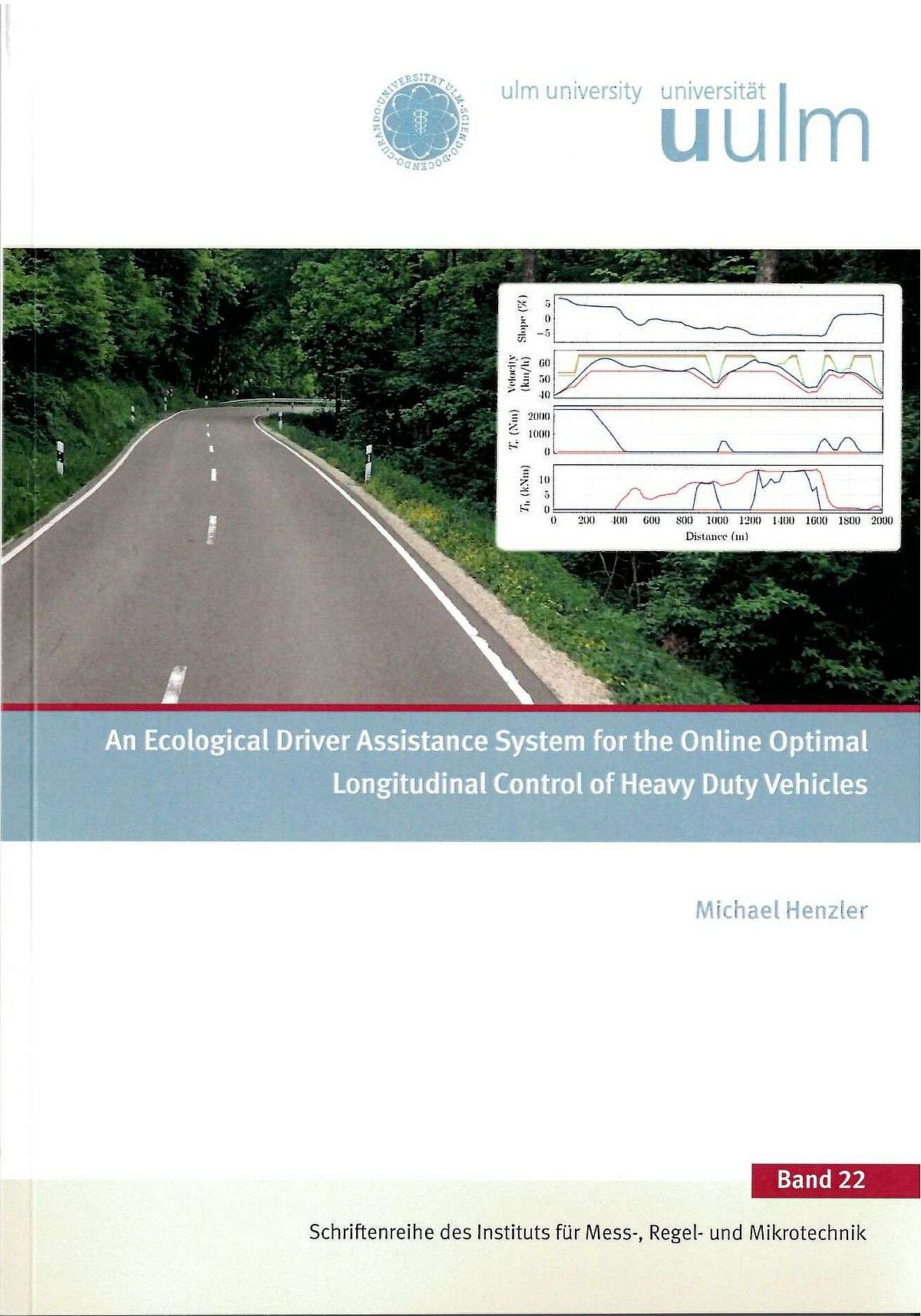
Titel
An Ecological Driver Assistance System for the Online Optimal Longitudinal Control of Heavy Duty Vehicles
ISBN
Print: 978-3-941543-32-4
Zaiser, Stefan
2017, Band 21
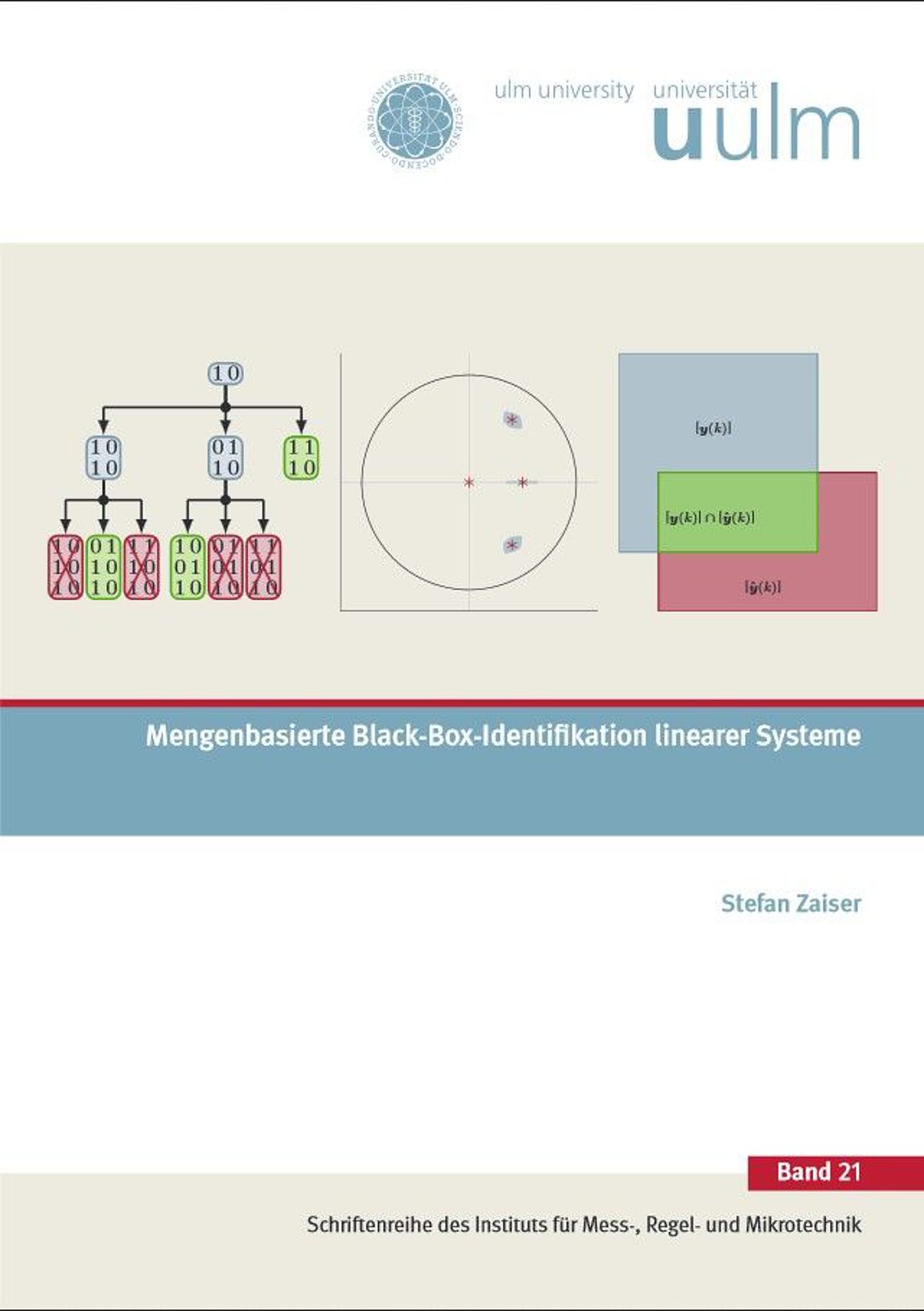
Titel
Mengenbasierte Black-Box-Identifikation linearer Systeme
ISBN
Print: 978-3-941543-30-0
Online: 978-3-941543-31-7
Nuß, Dominik
2017, Band 20
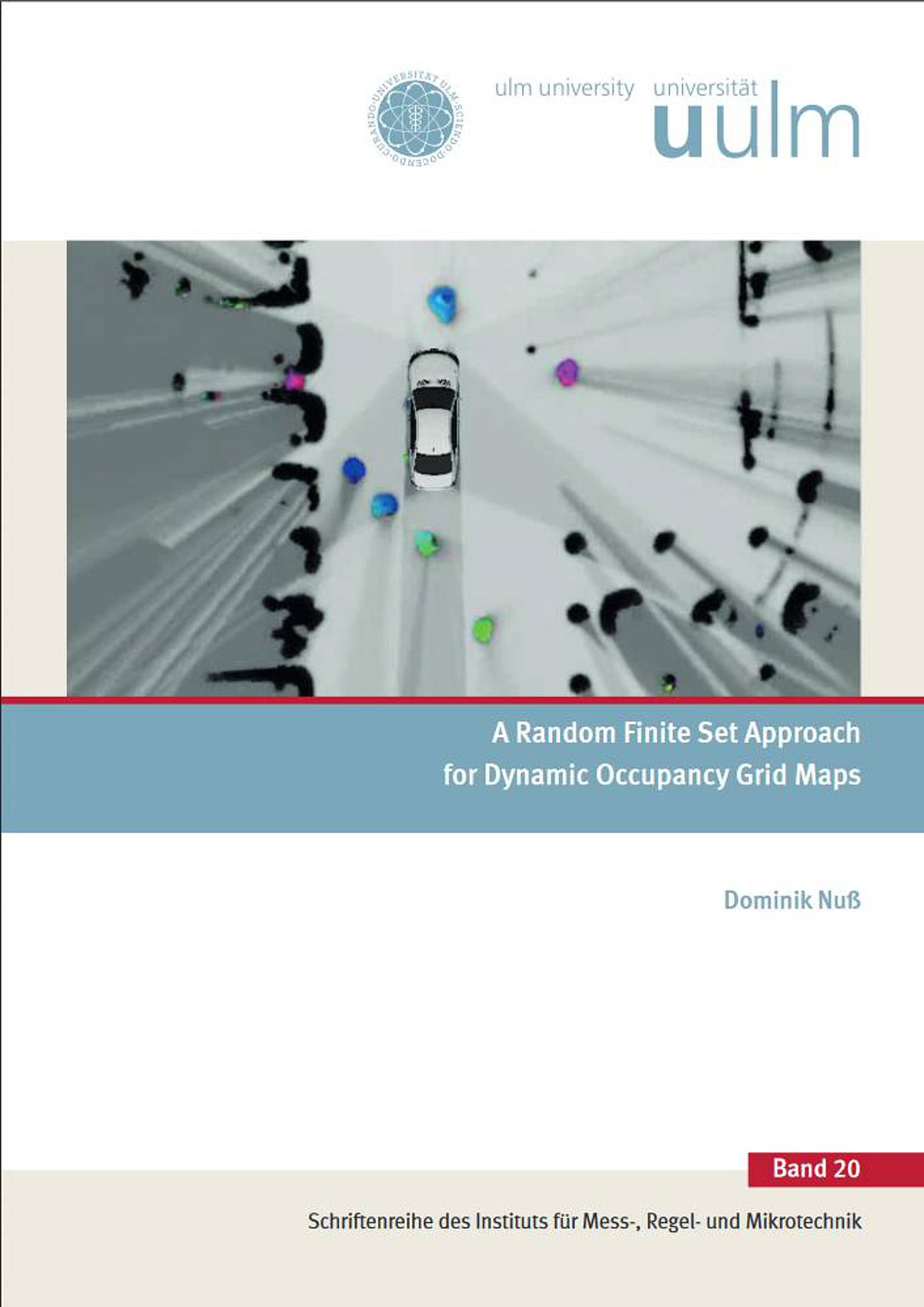
Titel
A random finite set approach for dynamic occupancy grid maps
ISBN
Print: 978-3-941543-28-7
Online: 978-3-941543-29-4
Wiest, Jürgen
2017, Band 19
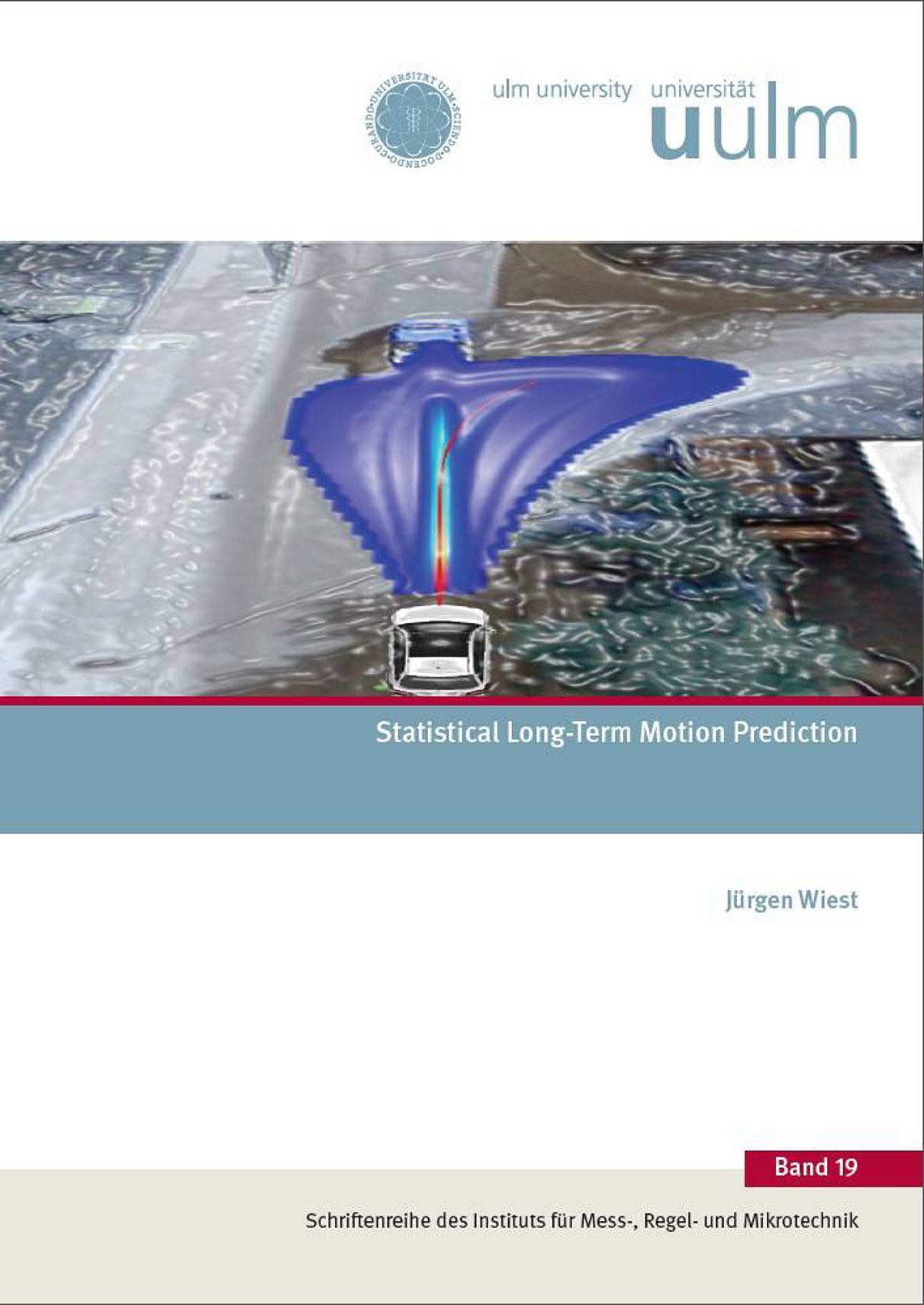
Titel
Statistical long-term motion prediction
ISBN
Print: 978-3-941543-26-3
Online: 978-3-941543-27-0
Specker, Thomas
2016, Band 18
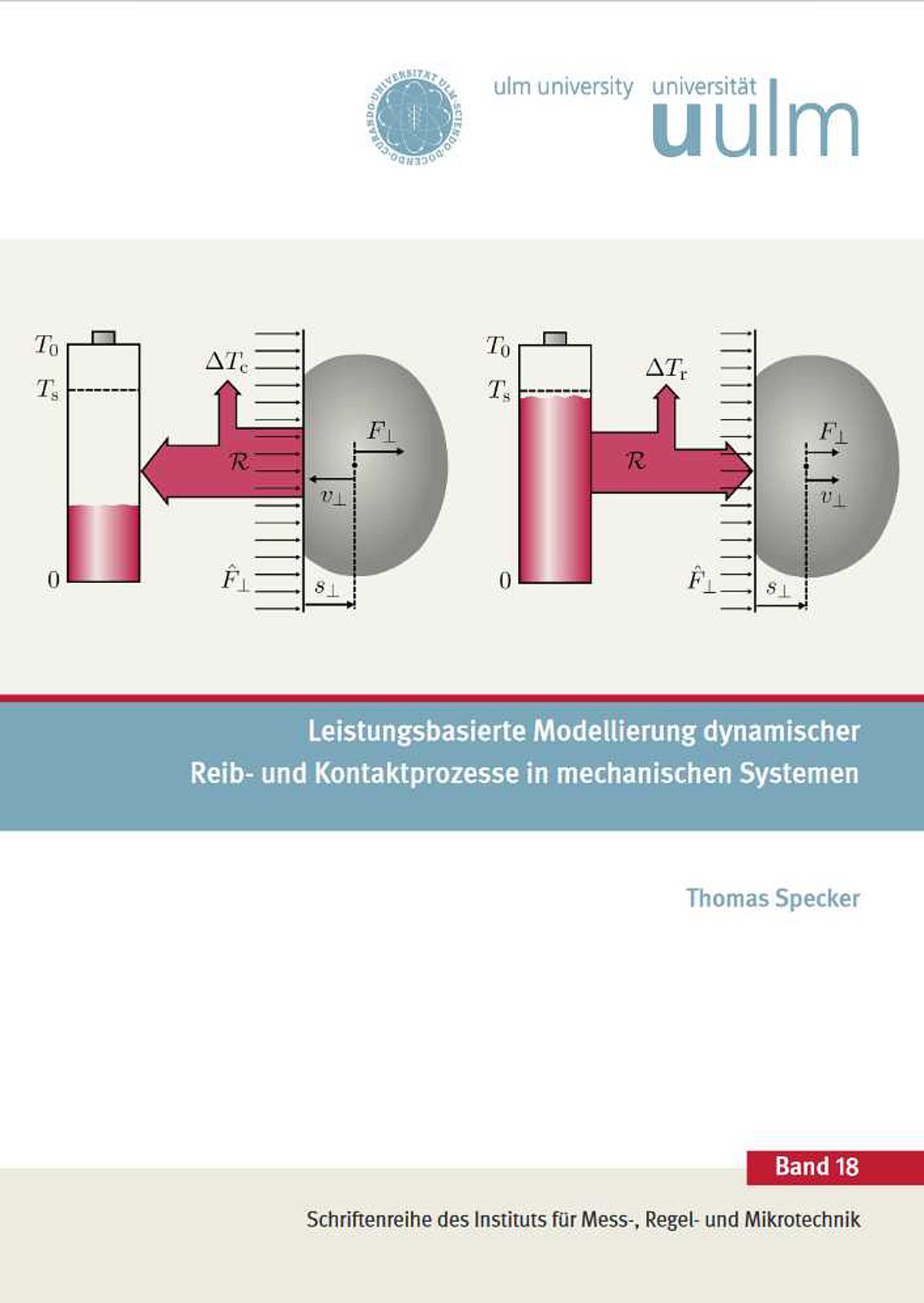
Titel
Leistungsbasierte Modellierung dynamischer Reib- und Kontaktprozesse in mechanischen Systemen
ISBN
Print: 978-3-941543-24-9
Online: 978-3-941543-25-6
Deusch, Hendrik
2016, Band 17
Titel
Random finite set-based localization and SLAM for highly automated vehicles
ISBN
Print: 978-3-941543-22-5
Online: 978-3-941543-23-2
Berndt, Holger
2016, Band 16
Titel
Fahrerabsichtserkennung und Gefährlichkeitsabschätzung für vorausschauende Fahrerassistenzsysteme
ISBN
Print: 978-3-941543-20-1
Online: 978-3-941543-21-8
Meissner, Daniel
2015, Band 15
Titel
Intersection-based road user tracking using a classifying multiple-model PHD filter
ISBN
Online: 978-3-941543-19-5
Schüle, Florian
2015, Band 14
Titel
Kartenbasierte Straßenverlaufsprädiktion zur Sichtunterstützung bei Nacht
ISBN
978-3-941543-18-8
de Jong, Marcel
2015, Band 13
Titel
Dreidimensionale Rekonstruktion und Verfolgung von Elektrophysiologiekathetern aus asynchronen biplanaren Fluoroskopiebildsequenzen
ISBN
Print: 978-3-941543-16-4
Online: 978-3-941543-17-1
Rößling, Christoph
2014, Band 12

Titel
Video and Image Manipulation for Enhanced Perception
ISBN
Print: 978-3-941543-14-0
Online: 978-3-941543-15-7
Reuter, Stephan
2014, Band 11
Titel
Multi-Object Tracking Using Random Finite Sets
ISBN
Print: 978-3-941543-12-6
Online: 978-3-941543-13-3
Szabo, Tomas
2014, Band 10
Titel
Modellbasiertes Regelkonzept für Doppelkupplungsgetriebe mit pneumatischer Aktorik
ISBN
Online: 978-3-941543-11-9
Muntzinger, Marc M.
2012, Band 9
Titel
Zustandsschätzung mit chronologisch ungeordneten Sensordaten für die Fahrzeugumfelderfassung
ISBN
978-3-941543-08-9
Munz, Michael
2011, Band 8
Titel
Generisches Sensorfusionframework zur gleichzeitigen Zustands- und Existenzschätzung für die Fahrzeugumfelderkennung
ISBN
978-3-941543-06-5
Weiss, Thorsten-Tobias
2011, Band 7
Titel
Hochgenaue Positionierung und Kartographie mit Laserscannern für Fahrerassistenzsysteme
ISBN
978-3-941543-05-8
Hartung, Christine
2011, Band 6
Titel
Image-guided navigation at the beating heart for open heart bypass surgery
ISBN
978-3-941543-07-2
Quester, Claudia
2011, Band 5
Titel
Image-guided Navigation during Coronary Artery Bypass Grafting at the Arrested Heart
ISBN
978-3-941543-04-1
Mählisch, Mirko
2010, Band 4
Titel
Filtersynthese zur simultanen Minimierung von Existenz-, Assoziations- und Zustandsunsicherheiten in der Fahrzeugumfelderfassung mit heterogenen Sensordaten
ISBN
978-3-941543-03-4
Fürstenberg, Kay
2009, Band 3
Titel
Fahrzeugumfelderfassung und Fußgängerschutz unter Nutzung mehrzeiliger Laserscanner
ISBN
978-3-941543-02-7
Wender, Stefan
2008, Band 2
Titel
Multisensorsystem zur erweiterten Fahrzeugumfelderfassung
ISBN
978-3-941543-00-3