Autonomous Driving and Advanced Driver Assistance Systems
Alongside electromobility, the research and development of advanced driver assistance systems and automated vehicles is one of the most active areas in vehicle research today. In addition to increasing comfort, this work is focussed on the vision of significantly reducing the number of injuries and fatalities in road traffic and thus making a contribution to road safety.
Our institute works in close cooperation with leading vehicle manufacturers and suppliers on new methods and algorithms for the entire processing chain necessary for vehicle automation. This includes environment sensing using camera, lidar and radar sensors, in particular object recognition and classification, object tracking to detect and estimate the movement of other road users, situation assessment and behaviour planning as well as trajectory planning and vehicle control. Another aspect is high-precision self-localization on high-accuracy digital maps in the cm range, for which landmark-based methods are used in fusion with GNSS. For testing the methods in real road traffic, the institute operates three automated test vehicles, which differ in terms of sensor and computer equipment. In addition, two vehicles have a mobile radio interface for receiving additional data from an intelligent infrastructure, which has also been set up in Ulm-Lehr.

Test Vehicles
Our institute currently operates three self-built test vehicles for automated testing on public roads with safety drivers. For this we have the corresponding exemptions, since the vehicles no longer correspond to a series production status after the conversion. The vehicles are based on a Mercedes Benz E-Class, a Mercedes Benz S-Class and an Audi A6 and differ mainly in their sensor and computer equipment, but also how we access accelerator, brake and steering.
Sensor Concept
The sensor concept of our test vehicles includes a 360° surround view based on cameras, radar sensors and lidar sensors. The different sensors not only offer complementary fields of view, but are also based on completely different measurement principles. The task of sensor fusion is to make optimal use of the respective strengths of the individual sensors in different areas in order to create an improved overall picture of the environment.
Software Modules
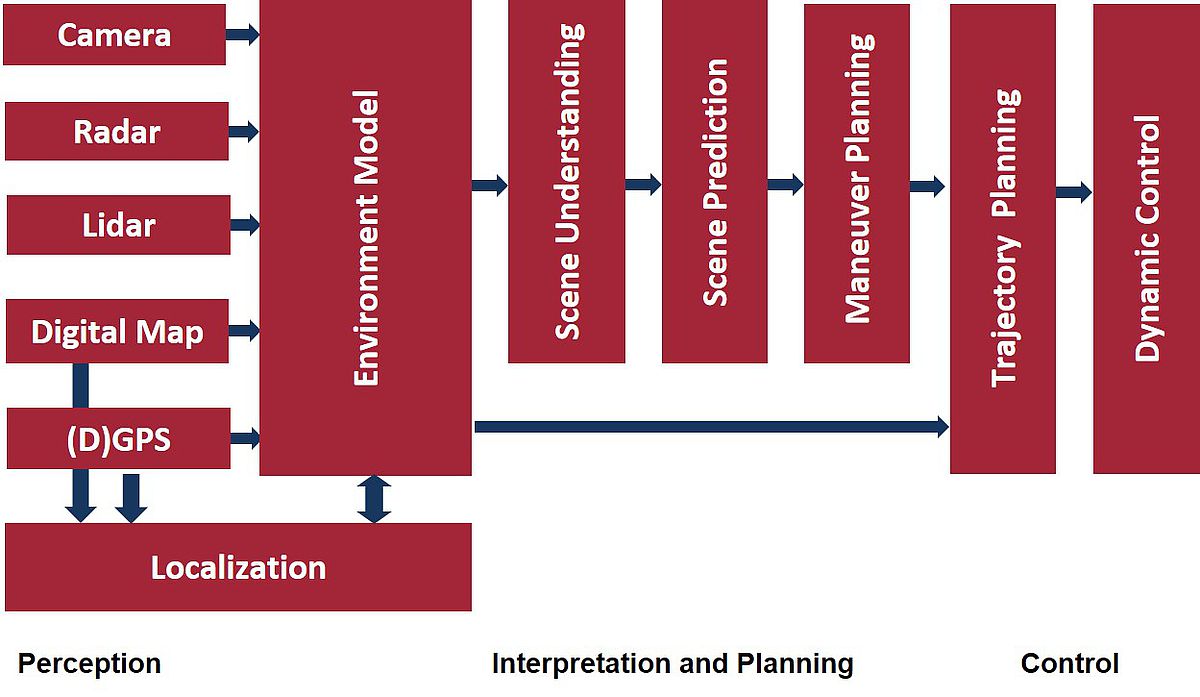
The software modules required to operate our automated test vehicles are developed independently in our group and continuously improved. The diagram shows the basic functional architecture of the modules and the information flow.
Functional Architecture
We use stereo and mono cameras, radar sensors of different resolution and range as well as various lidar sensors. Further sources of information are a high definition attributed digital map as well as a DGPS system, on the basis of which the exact position of the own vehicle in the map is determined in the localization module. The current dynamic environment model is determined from all input channels using grid-mapping, multi-object tracking and classification. In the environment model, each road user is represented by its own dynamic model with current dynamic state (location, speed, direction of travel, etc.), class affiliation (car, truck, pedestrian, cyclist, etc.) as well as local referencing to the digital map (lane assignment, etc.). Traffic lights and their current status, crosswalks and traffic signs are also recognized and the current status ist evaluated. The scene understanding module then determines implications between the objects and the current traffic situation. For example, a pedestrian near a crosswalk represents a special situation because he or she has priority when entering the crosswalk. Situation prediction then also attempts to predict the probable temporal development of the traffic situation in order to plan the action of the automated vehicle based on the criteria of safety and comfort. Trajectory planning then determines a safe executable vehicle trajectory, i.e., the path to be followed to be executed by the subordinate vehicle control systems.
Test Site
For vehicle testing, we use both urban areas and country roads. Our standard route covers a wide range of challenges, such as driving through roundabouts and intersections, the correct behavior at crosswalks and traffic lights, and compliance with prescribed speed limits.