Downloads zur Modellierungswoche 2011
- ohne Downloads -
Downloads zur Modellierungswoche 2012
Programm Modellierungswoche 2012
Vorträge
Übung am Montag: Abstandskontrolle mit Lego Mindstorms
- Präsentation: Einführung in Lego Mindstorms
- Übungsblatt
- Bauanleitung: Legofahrzeug
- Informationen zu Reglungen
Musterlösungen:
- Beispielprogramm aus der Präsentation Beispiel.nxc
- 2.1 EinfacheFahrt.nxc
- 2.2 Schalter-Steuerung.nxc, Lichtsensor-Steuerung.nxc
- 2.3 2-Punkt-Regler.nxc
- 2.4 3-Punkt-Regler.nxc
- 2.5 P-Regler.nxc
Übung am Dienstag: Abstandsreglung mit Matlab/Simulink
Musterlösungen:
- SimulinkModell-VertikalSchwingung.png
- SimulinkModell-HorizontlBewegung.png
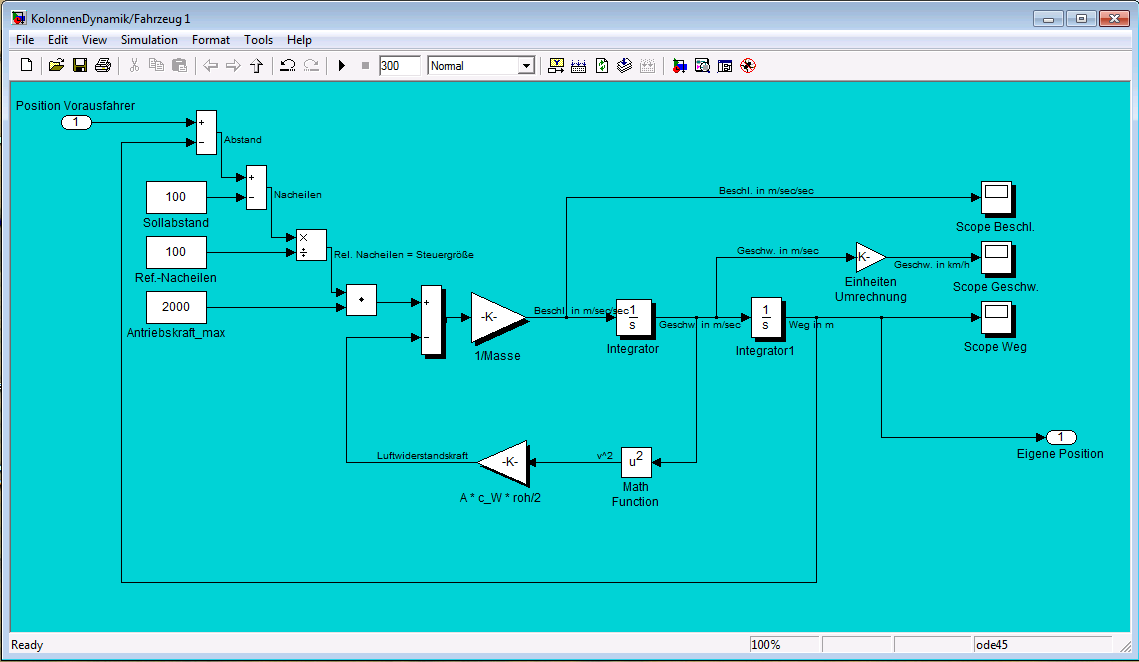
- SimulinkModell-KolonnenDynamik-P-Regler.png
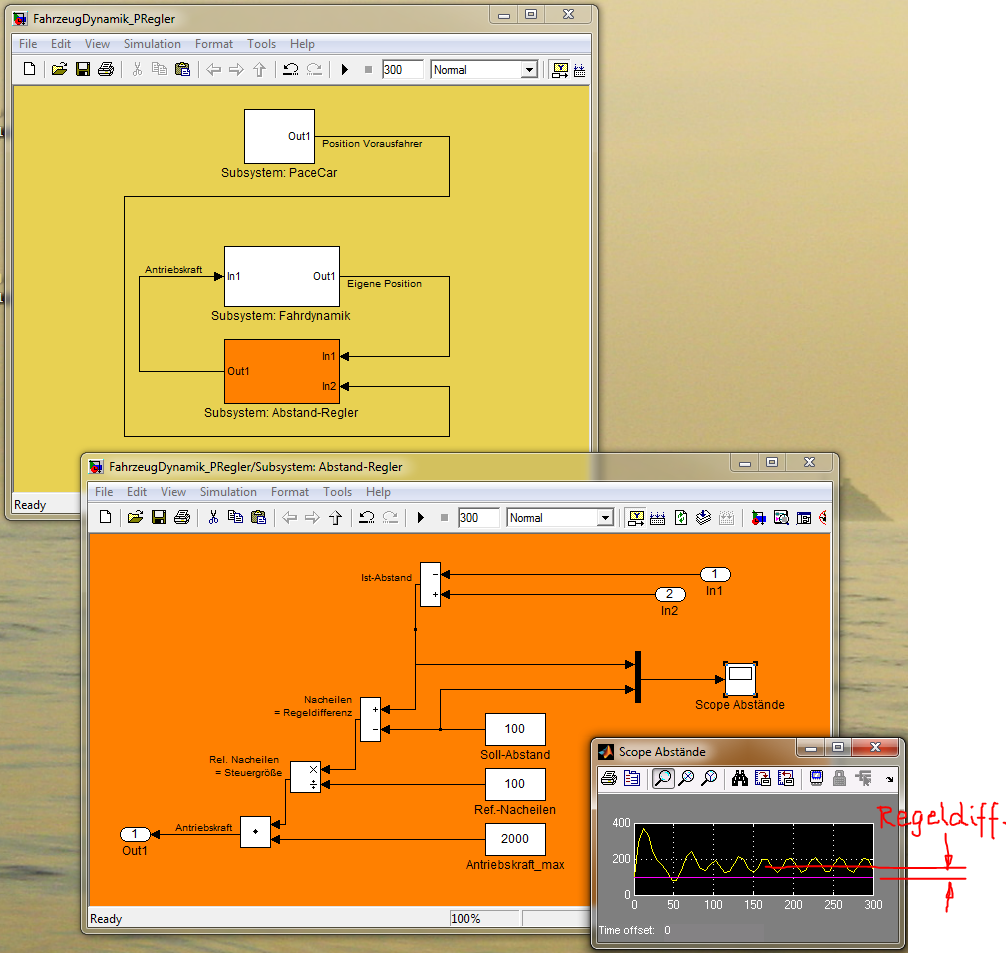
- ... mit Submodell-Fahrzeug-P-Regler.png
- SimulinkModell-KolonnenDynamik-PD-Regler.png
- ... mit Submodell-Fahrzeug-PD-Regler.png
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Bei einem reinen P-Regler (Proportional-Regler) zeigen sich zwei (bekannte) Nachteile:
- Regeldifferenz: Auch nach langer Zeit verbleibt eine Regeldifferenz, der Abstand ist größer als der Sollabstand. Wir haben gesehen, dass man durch Hinzufügen eines I-Anteils (integrierender Anteil) zum Regler diesen Regelabstand verhindern kann.
- Schwingung: Der Ist-Abstand schwingt um einen Mittelwert herum, was für die weiter hinten fahrenden Fahrzeuge zunehmend zum Problem wird und zu Kollisionen führen kann. Durch weiteres Hinzufügen eines D-Anteils (differenzierender Anteil) kann auch dieser Nachteil vermieden werden.
So erhält man aus einem P-Regler einen sogenannten PID-Regler, der tatsächlich oft verwendet wird.
Übung am Mittwoch: Kolonnendynamik auf der Legoschiene - oder freie Projektarbeit
(ohne Downloads)
Downloads zur Modellierungswoche 2013
Programm Modellierungswoche 2013
Übung am Montag: Kran mit Lego Mindstorms
- Präsentation: Einführung in Lego Mindstorms
- Übungsblatt 1
- Bauanleitung: Legokran
- Informationen zu Reglungen
Musterlösungen:
- Beispielprogramm aus der Präsentation Beispiel.nxc
- 2.1 EinfacheFahrt.nxc
- 2.2 Schalter-Steuerung.nxc, Lichtsensor-Steuerung.nxc
- 4.1 Dreipunkt-Regeler.nxc
- 4.2 Proportionalregeler.nxc
- 4.3 PD-Regler.nxc
Übung am Dienstag: Kranschwingung mit Matlab/Simulink
Musterlösung:
{kind=link}
Übung am Mittwoch: Regelung des Kranmodells
Downloads zur Modellierungswoche 2014
Programm Modellierungswoche 2014
Übung am Montag: Lego Mindstorms
Musterlösungen:
- Beispielprogramm aus der Präsentation Beispiel.nxc
- Aufgabe 1: Motorsteuerung.nxc
Übung am Dienstag: Matlab/Simulink
- Übungsblatt 2: Balldynamik
Übung am Mittwoch: Vorbereitung auf den Wettbewerb
- Optimierung des Modells für den Wettkampf
- Schussübungen am Wettkampfplatz
Downloads zur Modellierungswoche 2015
Übung am Montag: Abstandskontrolle mit Lego Mindstorms
- Präsentation: Einführung in Lego Mindstorms
- Übungsblatt
- Bauanleitung: Legofahrzeug
- Informationen zu Reglungen
Lösungsvorschläge:
- Beispielprogramm aus der Präsentation Beispiel.nxc
- 2.1 EinfacheFahrt.nxc
- 2.2 Schalter-Steuerung.nxc, Lichtsensor-Steuerung.nxc
- 2.3 2-Punkt-Regler.nxc
- 2.4 3-Punkt-Regler.nxc
- 2.5 P-Regler.nxc
Übung am Dienstag: Abstandsreglung mit Matlab/Simulink
Musterlösungen:
- SimulinkModell-VertikalSchwingung.png
- SimulinkModell-HorizontlBewegung.png
- SimulinkModell-mitAbstands-P-Regler.png
- SimulinkModell-KolonnenDynamik-P-Regler.png
- ... mit Submodell-Fahrzeug-P-Regler.png
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Vorlesung am Mittwoch: Etwas Regelungstechnik
Bei einem reinen P-Regler (Proportional-Regler) zeigen sich zwei (bekannte) Nachteile (vgl. P-Regler.png)
- Regeldifferenz: Auch nach langer Zeit verbleibt eine Regeldifferenz, der Abstand ist größer als der Sollabstand. Wir haben gesehen, dass man durch Hinzufügen eines I-Anteils (integrierender Anteil) zum Regler diesen Regelabstand verhindern kann.
- Schwingung: Der Ist-Abstand schwingt um einen Mittelwert herum, was für die weiter hinten fahrenden Fahrzeuge zunehmend zum Problem wird und zu Kollisionen führen kann. Durch weiteres Hinzufügen eines D-Anteils (differenzierender Anteil) kann auch dieser Nachteil vermieden werden.
So erhält man aus einem P-Regler einen sogenannten PID-Regler, der tatsächlich oft verwendet wird.
{kind=link}
{kind=link}
In der folgenden Simulation fahren 3 Fahrzeuge hinter dem Pace-Car (gelb) her. Das erste mit einer P-, das zweite mit einer PD- und das dritte mit einer PID-Abstandsregelung. Deutlich erkennt man beim ersten (magenta) eine permanente Abweichung vom Sollabstand (100 m) und eine stärkere Schwingung um den Mittelwert. Das zweite Fahrzeug (hellblau) kann mit Hilfe des differenzierenden Anteils die Schwingung reduzieren. Der zusätzliche I-Anteil im dritten Fahrzeug (rot) führt zu einem besseren Anschmiegen an den Sollabstand.
- SimulinkModell-Kolonnendynamik-PID-Regler.png
- ... mit Submodell-PID-Regler.png
- Kolonnendynamik_PIDRegler.slx
{kind=link}
{kind=link}
Übung am Mittwoch: Kolonnendynamik auf dem LEGO-Schienenkreis - oder freie Projektarbeit
(ohne Downloads)
Downloads zur Modellierungswoche 2016
Übung am Montag: Containerkran mit Lego Mindstorms
- Präsentation: Einführung in Lego Mindstorms und BricxCC
- Übungsblatt 1
- Bauanleitung: Legokran
- Nützliche BricxCC-Befehle
- Informationen zu Reglungen
Musterlösungen (werden später freigeschaltet):
Übung am Dienstag: Kranschwingung mit Matlab/Simulink
Übung am Mittwoch: Vorführung und Begutachtung der Kranmodelle
- Optimiert und testet Eure Kranmodelle
- Bereitet Euch auf die Vorführung vor
Downloads zur Modellierungswoche 2017
- ohne Downloads -
Downloads zur Modellierungswoche 2018
Materialien zum Download hier zu finden: https://cloudstore.uni-ulm.de/s/1nXlQjvtMghksXV
Downloads zur Modellierungswoche 2019
Materialien zum Download hier zu finden: https://cloudstore.uni-ulm.de/s/QzjjA5ryymF2mjA