Team Spatzenhirn
Lerne das Team kennen!
Offenes Treffen im Teamraum (41.1.101)
- während dem Semester sind wir meisten im Teamraum anwesend, kommt einfach vorbei :)
CAuDri-Challenge 2023: Free Drive
CAuDri-Challenge 2023: Obstacle Evasion Course
Video-Einreichung für den Carolo-Cup@Home 2022
Silber für Spatz X beim Carolo-Cup@Home 2021
Auf dem dieses Jahr online stattfindenden Carolo-Cup@Home hat sich der Spatz erneut einen Platz auf dem Treppchen gesichert. Wir konnten die Jury mit unserem Video überzeugen und belegten mit dem Team aus KITCar Karlsruhe gleichzeitig den 1. Platz in der Videowertung. Beim Vortrag konnten such die Karlsruher dann mit nur zwei Punkten mehr durchsetzen, sodass wir den 2. Platz in der Gesamtwertung belegten. Herzlichen Glückwunsch an dieser Stelle! Außerdem gratulieren wir den ISF Löwen aus Braunschweig zum 3. Platz.
Insgesamt können wir sehr stolz auf unsere Leistung dieses Jahr sein. Wir haben trotz Corona-Pandemie fleißig sowohl an Hard- und Software weiter gearbeitet und sind mit unserem Video sehr zufrieden. Der 2. Platz mit nur zwei Punkten Rückstand und der 1. Platz in der Videowertung fühlt sich auch beinahe so an wie ein zweiter 1. Platz.
Carolo-Cup@Home 2021
Dieses Jahr findet der Carolo-Cup als online Event statt. Alle Teams haben ein Video von ihrem Fahrzeug eingereicht. Das Finale findet am 12. Februar im hier verlinkten Livestream statt, hier ein Artikel der TU Braunschweig mit Details zum Event und den Teams.
Sieg! Spatz X gewinnt den CaroloCup 2019
Sieg! Auch in seiner zehnten Generation konnte sich der Spatz wieder ein Mal durchsetzen und sicherte sich zum bereits 5. Mal den Sieg. Glückwunsch auch an die zweitplatzierten aus Karlsruhe KITcar, ihr habt es wirklich spannend gemacht:-. Außerdem an cdlc für den dritten Platz, welche leider mit Startschwierigkeiten zu kämpfen hatten.
Außerdem natürlich auch Glückwünsche an die Sieger des Basic Cups, OSCAR. Man sieht sich dann nächstes Jahr in der Königsdisziplin:-). Nicht zu vergessen sind auch die zweitplatzierten it:movES und der dritte Platz, welcher nach China an TU-Smart ging.
Vielen Dank auch an die Organisatoren der TU-Braunschweig für die Organisation des Cups, welcher all das Tüfteln am autonomen Modellfahrzeug für uns erst möglich macht. Außerdem auch vielen Dank an die Juoren und Sponsoren, welche natürlich auch einen Wesentlichen Anteil dazu beitragen.

Carolo Cup 2019
Morgen, den 05. Februar 2019 ist es so weit. Das Team Spatzenhirn tritt zum bereits zehnten Mal beim Carolo Cup in Braunschweig an. Dieser kann wie in den vergangenen Jahren über einen Livestream mitverfolgt werden. Zuvor gibt es auch Möglichkeit dem freien Training zu folgen, in welchem wir noch den letzten Feinschliff vor dem Cup vornehmen werden.
Im Bild zu sehen sind die Spatzen der vergangenen Jahre sowie das Ergebnis, welches sie einfahren konnten. Schön im Bild zu sehen ist auch, dass stets mehr Wert auf Funktionalität gelegt wurde und Ästhetik in Teamtradition eher zweitrangig gehandhabt wurde.
Das Bild findet sich in besserer Qualität auf unserer facebook-Seite.

Das Team Spatzenhirn stellt sich vor
Dieses Video gibt einen kurzen Einblick, was das Team Spatzenhirn tut und was unsere Ziele sind. Habt ihr Lust bekommen bei uns mal rein zu schauen? Dann kommt doch einfach mal bei uns in 41.1.101 vorbei. Wenn ihr Lust bekommen habt aktiv bei uns mitzumachen: Ab Februar werden wir wieder kräftig Verstärkung brauchen. Was euch erwartet? Tolles Teamwork, ein super nettes, erfolgreiches, ehrgeiziges, ... Team, viele spannende Erfahrungen, die Möglichkeit in den Vorlesungen Erlerntes umzusetzen und vieles mehr. Wir freuen uns auf euren Besuch!
Team Spatzenhirn 2019

Das Team Spatzenhirn sucht noch Unterstützung für die nächste Saison. Nachdem wir im Februar einen 3. Platz einfahren konnten gilt es nun das Fahrzeug bestmöglich auf die nächste Saison vorzubereiten. Wenn du also Interesse an hochautomatisierten Fahrzeugen hast oder deine Theoretischen Kenntnisse aus der Vorlesung mal in die Praxis umsetzen willst, dann schau doch mal bei unserem Vorstellungstreffen am 08.05. bei uns vorbei. Treffpunkt ist um 16:00 vor unserem Teamraum an der Uni West (41.1.101)
Team Saison 2018

Das Team Spatzenhirn startet in eine neue Saison und sucht noch Verstärkung.
Wenn du Elektrotechnik, Informationssystemtechnik, Informatik, Medieninformatik oder Physik und an der Uni Ulm studierst und Interesse hast ein autonomes Modellfahrzeug mitzuentwickeln oder sonst Interesse hast dich bei uns einzubringen dann schau doch einfach mal an unserem Treffen am 10.05. vorbei.
Solltest du einfach nur interessiert daran sein, was wir so tun, so bist du auch herzlich eingeladen bei diesem Treffen dabei zu sein.
Solltest du dich uns anschließen, so erwarten dich spannende Aufgaben der Elektrotechnik und Softwareentwicklung.
Einige unserer Aufgabenbereiche in der Software sind:
- Bildverarbeitung zur Erkennung von Schildern, Spuren, Sperrflächen, Zebrastreifen , Stopplinien und anderen Fahrbahnmarkierungen.
- Trajektorienplanung basierend auf der erkannten Spur
- Entwickeln einer Regelung um der Spur zu folgen
- Programmieren einer Kommunikationsschnittstelle zur Hardware
- Auswertung von Sensorik wie Laserabstandssensor, Gyroskop, Accelerometer und Tiefenkamera
- Erkennung von Hindernissen
- Entscheidungsfindung im Hinderniskurs
- Mapping und Tracking der gefahrenen Strecke und erkannter Objekte
- ...
in der Hardware kümmern wir uns um
- Platinenentwicklung, Bestückung, Tests und Instandhaltung
- Firmwareprogrammierung zur Hardwaresteuerung (auf STM32-Basis)
- Aufbau und Verbesserung des Fahrwerks
- ...
weitere Aufgaben sind (eventuell auch für ganz andere Studiengänge interessant)
- PR
- Organisation des Teams
- Zusammenarbeit mit Sponsoren
- Präsentation des Teams bei Ausstellungen / Vorstellungen
- ...
Das Team nimmt in der Saison 2018 erstmalig am erweiterten Hauptwettbewerb Teil.
Bei diesem gilt es nicht mehr nur Hindernissen auszuweichen und an Stopplinien zu halten sondern auch Geschwindigkeitsbegrenzungen zu erkennen und einzuhalten, Zebrastreifen und Fußgänger zu beachten, Sperrflächen zu umfahren, Höhenunterschiede zu bewältigen und vieles mehr.
Die Videoufnahme des erweiterten Hinderniskurses des Teams CDLC, welches bereits in der letzten Saison(2017) den erweiterten Hinderniskurs gefahren ist zeigt diese neuen Herausforderungen sehr gut.
Sieg!

Das Team Spatzenhirn konnte sich im diesjährigen Hauptwettbewerb des Carolo-Cups durchsetzen und belegte damit bereits zum 4. mal den ersten Platz.
Es war ein spannender Wettbewerb und wir sind erleichtert, dass unser Fahrzeug den hohen Erwartungen und Anforderungen stand halten konnte.
Nun gilt es den Spatz für die kommende Saison zu verbessern um auch den Herausforderungen des erweiterten Wettbewerbs gewachsen zu sein.
Der neue Spatz

Der neue Spatz steht bereit und fiebert dem Cup entgegen. Vielen Dank an unsere Sponsoren Lensation, Leuze electronic, Electrobit, Daimler und Mouser, die uns den Aufbau des neuen Fahrzeugs mit ermöglichten.
Neues Team für den Carolo Cup 2017
Da die neue Sasion für den Carolo Cup startet, bildet das Team Spatzenhirn ein neues Team. Wenn ihr bei uns mitmachen wollt bieten wir eine Infoveranstaltung am 27.04.2016 in Raum 41.2.226 um 18:15 an. Falls ihr interesse habt an einem tollen Projekt und netter Teamarbeit könnt ihr gerne vorbei schauen.
Oh Tan(n)enbaum ;-)
Wir haben unseren "Baum" bereits festlich geschmückt, die Weihnachtsfeier kann kommen.
Frohe Feiertage wünscht das Team Spatzenhirn!
Elektrotechnik an der uulm

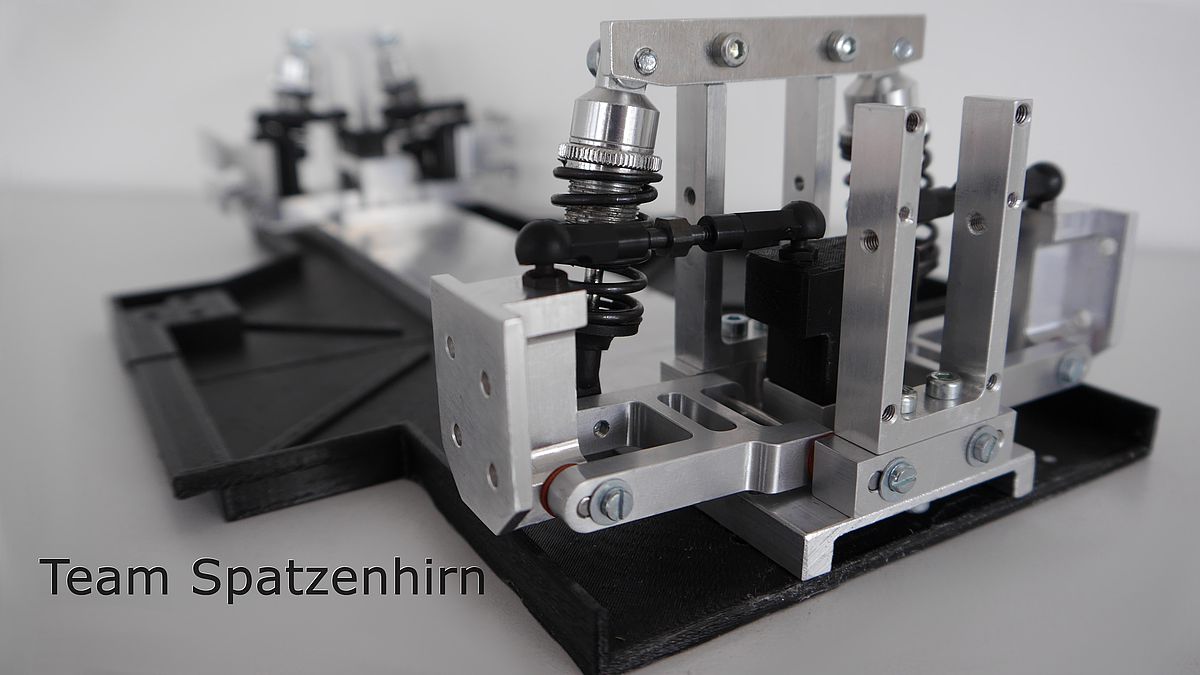
Brandneues Fahrwerk für Spatz 7
Nach nächtelanger Geheimarbeit in den tiefsten Kellern der Uni kann man nun das neue Fahrwerk in voller Pracht bestaunen. Es ist nicht nur leichter geworden, sondern nun komplett überarbeitet. Aus dem Prototypenstadium in letztem Jahr wurde nun ein High-End-Fahrwerk.
Hier hat unser Mechanik-Team, bestehend aus Markus König, Alexander Grathwohl, David Werbunat und Ingolf Hurst wirklich Ganze Arbeit geleistet.
Ein besonderer Dank geht auch an die Wissenschaftliche Werkstatt Feinwerktechnik der Universität Ulm, ohne deren Hilfe dies nicht in so hervorragender Qualität möglich gewesen wäre.
Motortreiberplatinen sind fertig
Dank der ultraschnellen und erstklassigen Unterstützung von Würth Elektronik sind die Brushless-Dualchannel-Motortreiberplatinen von unseren beiden Entwicklern Thomas Wodtko und Patrick Weggler nun frisch gelötet und warten auf ihren Einsatz.
Die Vorteile unsere eigenen Motortreiber herzustellen liegen primär darin, dass wir durch eine direkte Ansteuerung mittels CAN und einer Momentenregelung die Kraft gekonnt auf die Bahn übertragen können.

Neue Kaffeemaschine

Vielen Dank an Heinl Kaffee & Co für das Sponsern eines Kaffee-Vollautomaten!
Dieser liefert nicht nur leckeren Kaffee, sondern sorgt mit dem nötigen Koffeinschub auch für eine Produktivitätsteigerung der Teammitglieder von über 300%! :)
Projekt Titelverteidigung erfolgreich

Der Spatz hat dieses Jahr wieder gewonnen und damit als erstes Auto beim Cup den Titel verteidigt!
Diese Leistung ist nicht nur auf den unglaublichen Teamgeist unseres Teams zurückzuführen, sondern wäre ohne unsere tollen Sponsoren und der helfenden Hände der Uni Ulm nicht möglich gewesen. Besonders danken möchten wir dem gesamten für Institut für Mess-, Regel- und Mikrotechnik und dem LPT und unserem Betreuer Alexander Scheel sowie unseren Sponsoren Daimler, Elektrobit, Baumer, Leuze, Lensation und Peak.
Spatz6 fliegt
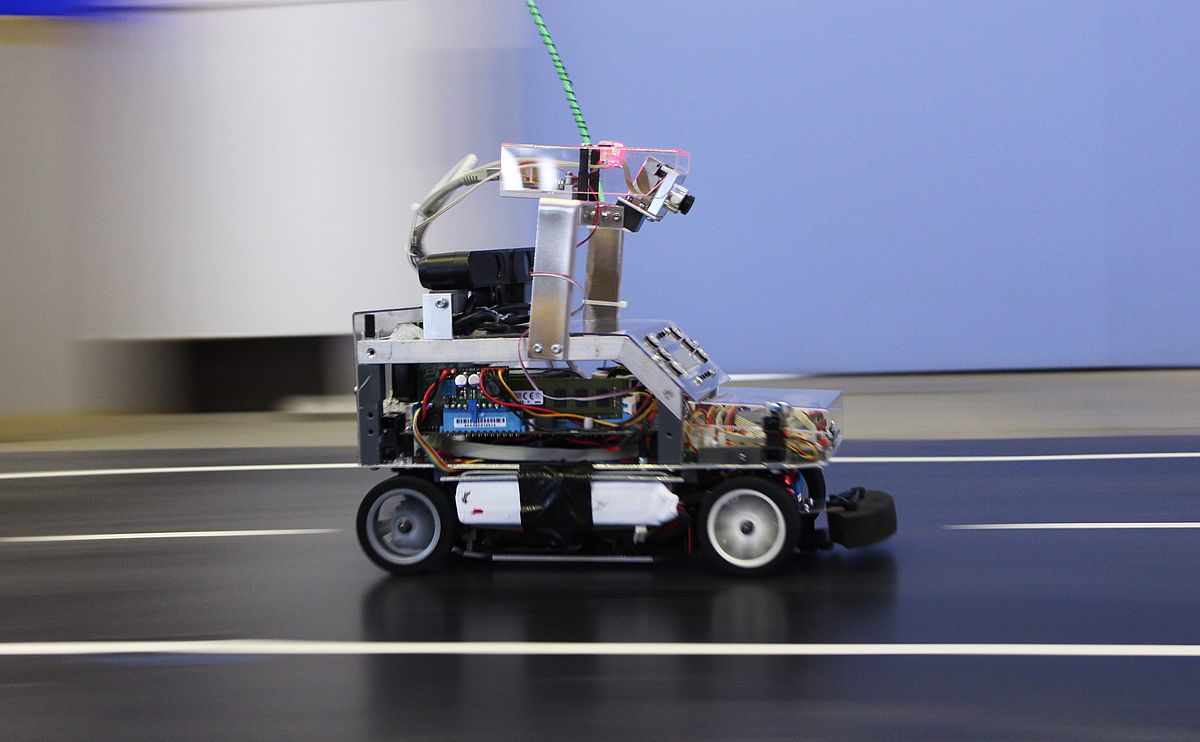
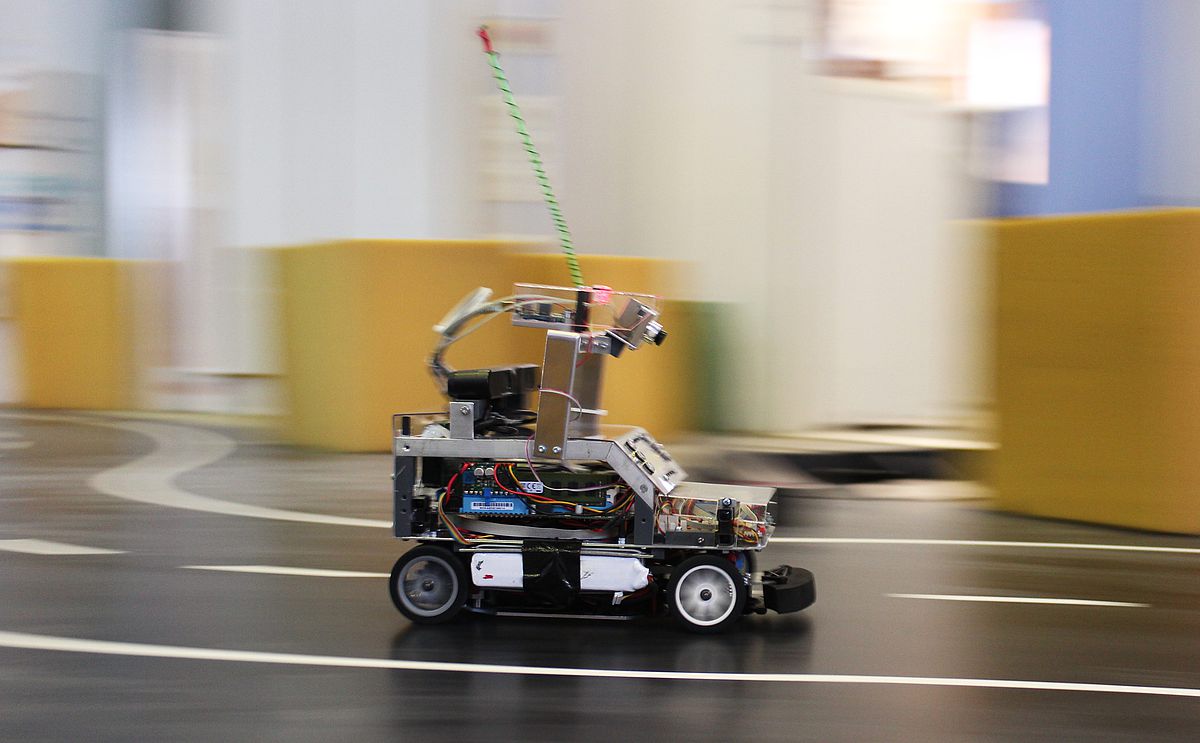
Kurz vor dem Carolo-Cup 2015 fliegt der runderneuerte Spatz6 fehlerfrei durch den Kurs.
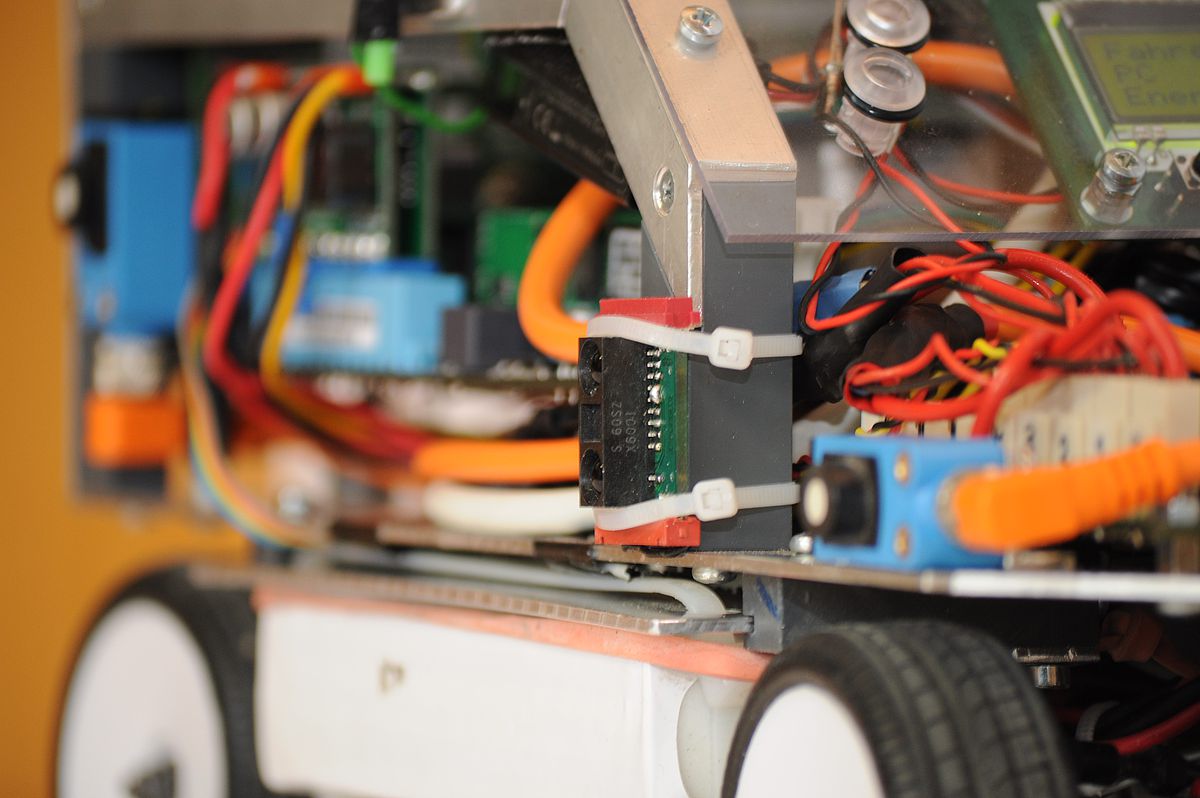
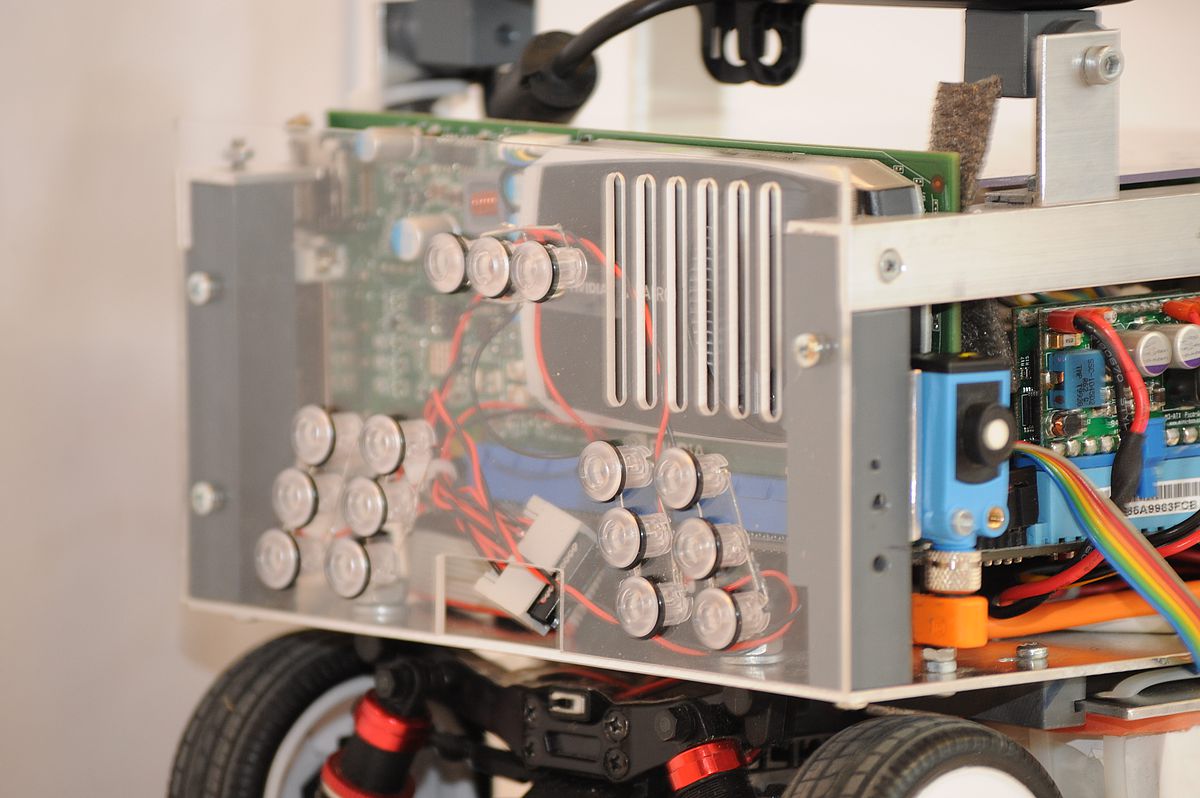
Finaler Aufbau des Spatz 2015
Der Spatz ist nun hardwareseitig fertig und fahrtüchtig.
Mit neuem Design und stark abgeändertem Konzept wird er der Konkurrenz (hoffentlich) davonfahren.
4 Motoren (einer in jedem Rad) sorgen für mehr Leistung und ermöglichen eine effizientere Regelung.
Dank neuer Infrarotsensoren an der Seite werden Parklücken zuverlässiger erkannt.
Unsere neue Energieplatine setzt neuerdings auf geballte 32-bit Power.
Die Software muss nur noch getestet werden. Dabei werden sicher keine Probleme aufkommen ;)


Prüfstand
Mit freundlicher Unterstützung des Instituts für eingebettete Systeme konnten wir auf deren Prüfstand unsere Motoren exakt vermessen.
Selbstlokalisierung
Um die Geschwindigkeit des Spatz weiter zu erhöhen, haben wir dieses Jahr ein neues Konzept aufgegriffen:
Selbstlokalisierung in einer automatisch erstellten Karte.
In der ersten Runde trägt das Fahrzeug die erkannten Anfangs- und Endpunkte aus dem Kamerabild in eine Karte ein.
Die fertige Karte enthält neben den reinen Punkten auch ein komplett optimiertes Geschwindigkeitsprofil, mit dem vor Kurven optimal abgebremst und aus Kurven optimal herausbeschleunigt werden kann.
Über die Kombination von Egomotion und Partikelfilter kann sich das Fahrzeug mit dem Kamerabild in der Karte lokalisieren.
Damit kann die Lokalisierung die aktuell optimale Geschwindigkeit ermitteln und an die Regelung weiter leiten.
Das Video zeigt oben die Karte und die Selbstlokalisierung und unten die Punkte- und Spurerkennung.
Neuer Fahrzeugaufbau

Nachdem wir letzten Jahr an die physikalischen Grenzen unseres Chassis gestoßen sind, liegt dieses Jahr ein Schwerpunkt auf der Neukonzipierung des Hardwareaufbaus.
Nach einem geglückten Prototypen ist nun das endgültige Fahrzeug kurz vor der Endmontage und kann hoffentlich in ein paar Wochen getestet werden.
We want you for Team Spatzenhirn!
Du studierst E-Technik, Informationssystemtechnik oder Informatik und möchtest auch mal was praktisches lernen? Dann mach mit beim "Projekt autonomes Modellfahrzeug" (Team Spatzenhirn)! Wir sind gerade auf Mitgliedersuche und würden uns freuen wenn du mal bei uns vorbeischauen würdest!
Unverbindliches Teamtreffen am Mittwoch 07.05. um 16:15 Uhr im Carolo Raum (41.1.101) - einfach mal vorbei schauen!
Team Spatzenhirn dankt Hendrik

Das Team Spatzenhirn dankt Hendrik für seine langjährige und tatkräftige Unterstützung und Betreuung!
Team Spatzenhirn sucht neue Mitglieder

Vielen Dank an unsere Sponsoren

Auf diesem Wege möchten wir uns bei allen unseren Sponsoren bedanken! Als wichtigste seien hier Baumer, Lensation, Elektrobit und Peak genannt. Durch den Einsatz Ihrer Produkte konnten wir in Braunschweig den 1. Platz holen. Vielen Dank!
Weitere Informationen in folgender Pressemitteilung:
Pressmeldungen über den Sieg der Spatzen

Quelle: braunschweigheute.de
Erste Pressemeldungen zu unserem Sieg in Braunschweig:
http://www.idw-online.de/pages/de/news573131#
http://www.braunschweiger-zeitung.de/lokales/Braunschweig/carolo-cup-in-der-tu-id1336226.html
http://braunschweigheute.de/carolo-cup-2014-ulmer-spatzenhirn-vor-braunschweiger-carolinchen/
Sieg für das Team Spatzenhirn
Sieg für das Team Spatzenhirn! Der 1. Platz im Carolo Cup 2014 geht nach Ulm! Wir sind überglücklich!
Jetzt gilts!

Jetzt gilts! Heute zeigt sich ob sich ein Jahr Arbeit auszahlen! Verfolgt heute Abend den Live-Stream! Die Links sind zu finden unter https://wiki.ifr.ing.tu-bs.de/carolocup/
Probeläufe aus Braunschweig
Hier die drei Probeläufe von gestern in unserem Youtubekanal:
http://www.youtube.com/watch?v=Dcso63dXfA8
http://www.youtube.com/watch?v=veG_p29WXIM
http://www.youtube.com/watch?v=5448lM2tgKQ
Livestream vom Carolo-Cup
Hallo zusammen,
die Uni Braunschweig bietet dieses Jahr einen offiziellen Stream an. Die Links sind zu finden unter:
https://wiki.ifr.ing.tu-bs.de/carolocup/
Der Link zum heutigen Trainingstag lautet:
Team Spatzenhirn goes Braunschweig

Wir sind gut in Braunschweig angekommen und haben schon erste Tests absolviert! Die Konkurrenz ist wieder mal stark! Jetzt heißt es alles geben!
Rundkurs vom 04.02.2014
Einparken vom 03.02.2014
Timelapse vom 02.02.2014

Videos von ersten Testfahrten auf neuer Teststrecke
Die erste Testfahrt auf unseren neuen Teststrecke der Institutshalle. Wir sind sehr dankbar dass wie wieder in der Halle sein dürfen!
Hardwareaufbau des neuen Spatzen vollständig

Der Hardwareaufbau unseres neuen Spatz ist nun nahezu vollständig. Unsere neue Ethernet-Kamera funktioniert und wir haben bereits die ersten Runden gedreht. Bald dürfen wir in die Institutshalle umziehen um auf unserer Teststrecke zu fahren. Wir halten euch auf dem Laufenden!
20.01.2014, Max Nigsch
Einen Monat bis zum Carolo-Cup 2014

Einen Monat noch bis zum Carolo-Cup in Braunschweig, das Team Spatzenhirn ist in der Testphase angekommen. Der neue Spatz wird diese Woche noch seine erste Runde drehen. Jetzt heißt es Gas geben! Anbei ein Bild vom neuen Spatz!
Team Spatzenhirn höchst motiviert für Carolo-Cup 2014
Das Team Spatzenhirn des Wintersemesters 2013/2014 ist höchst motiviert für den Carolo-Cup 2014. Bisher wurde an Änderungen unserer Sensor- und Aktorplatinen gearbeitet, wir haben eine neue Kamera von Baumer gesponsort bekommen ebenso wie eine Linse von Lensation.
In nächster Zeit steht also ein Hardwareumbau an bei dem außer Kamera, Linse und Platinen ein neuer Inkrementalgeber verbaut wird. Zusätzliche Infrarotsensoren sind bereits verbaut. Die Zeit bis Weihnachten nutzen wir nun um weiter an unserem Code zu arbeiten, bis alles rund läuft.
Liebe Grüße,
euer Team Spatzenhirn
Nach dem Cup ist vor dem Cup
Der Carolo-Cup 2013 ist vorbei, und das Team Spatzenhirn zieht Bilanz...
Die Konkurrenz war sehr stark, das Niveau durchweg sehr hoch. Unser Spatz 4 hatte aber durchaus das Potential, ganz oben mitzufahren. Leider hat das Glück dieses Jahr nicht mitgespielt, und wir mussten nur Stunden vor dem Wettkampf mit unerwarteten Softwareproblemen kämpfen. Mit einem dritten Platz konnten wir zwar ein versöhnliches Ergebnis erreichen, aber die Erwartungen im Team waren höher. Das ist aber kein Grund für uns, enttäuscht zu sein, sondern vielmehr zusätzliche Motivation für den Cup im nächsten Jahr!
Den Presseartikel der Uni Intern gibt es hier nachzulesen.
Patrick, 16.02.2013
Neue Rekordgeschwindigkeit!
Gestern Abend wurde auf unserer Teststrecke ein neuer Geschwindigkeitsrekord aufgestellt. Der Spatz4 ist jetzt schon so schnell, wie keiner seiner Vorgänger! Und der Optimierungsprozess steht gerade erst am Anfang...
Das Video dazu ist hier zu finden.
Patrick, 31.01.2013
Teststrecke vergrößert

Unsere Teststrecke liegt nun im XXL-Format bereit und wartet darauf, dass der Spatz auf ihr neue Rekordgeschwindigkeiten erreicht!
Patrick, 30.01.2013




Der Spatz trainiert...
Seit Freitag ist das Team samt Fahrzeug und Equipment in die große Halle zum Testen umgezogen. Fast rund um die Uhr wird in Schichten gearbeitet, um den Spatz optimal auf den Wettbewerb vorzubereiten.
Einen kleinen Eindruck zum Stand der Dinge vermittelt dieses Video...
Patrick, 24.01.2013
Schlussspurt!

Vier Wochen vor dem Wettkampf nähert sich unsere Software-Entwicklung dem Ende. Das komplette Team ist hochmotiviert und die verbleibende Zeit wird nun zur Optimierung unserer Algorithmen verwendet.
Patrick, 08.01.2013
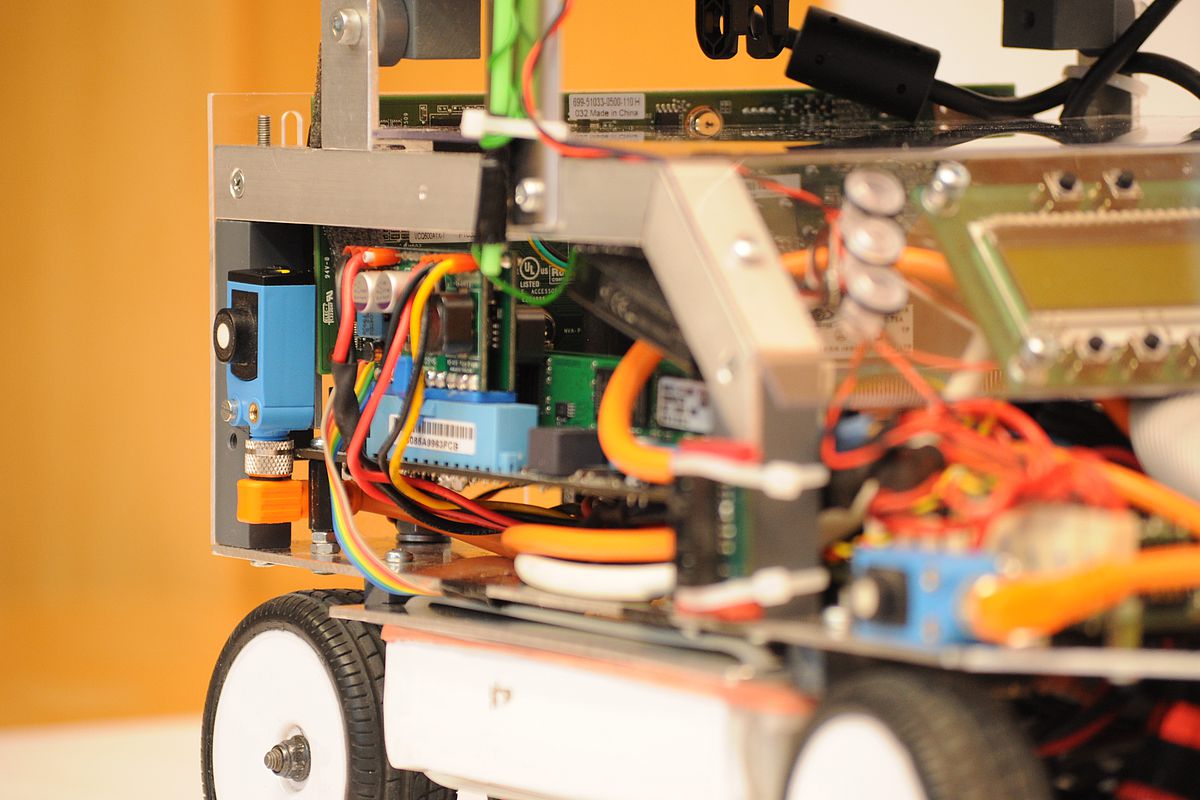
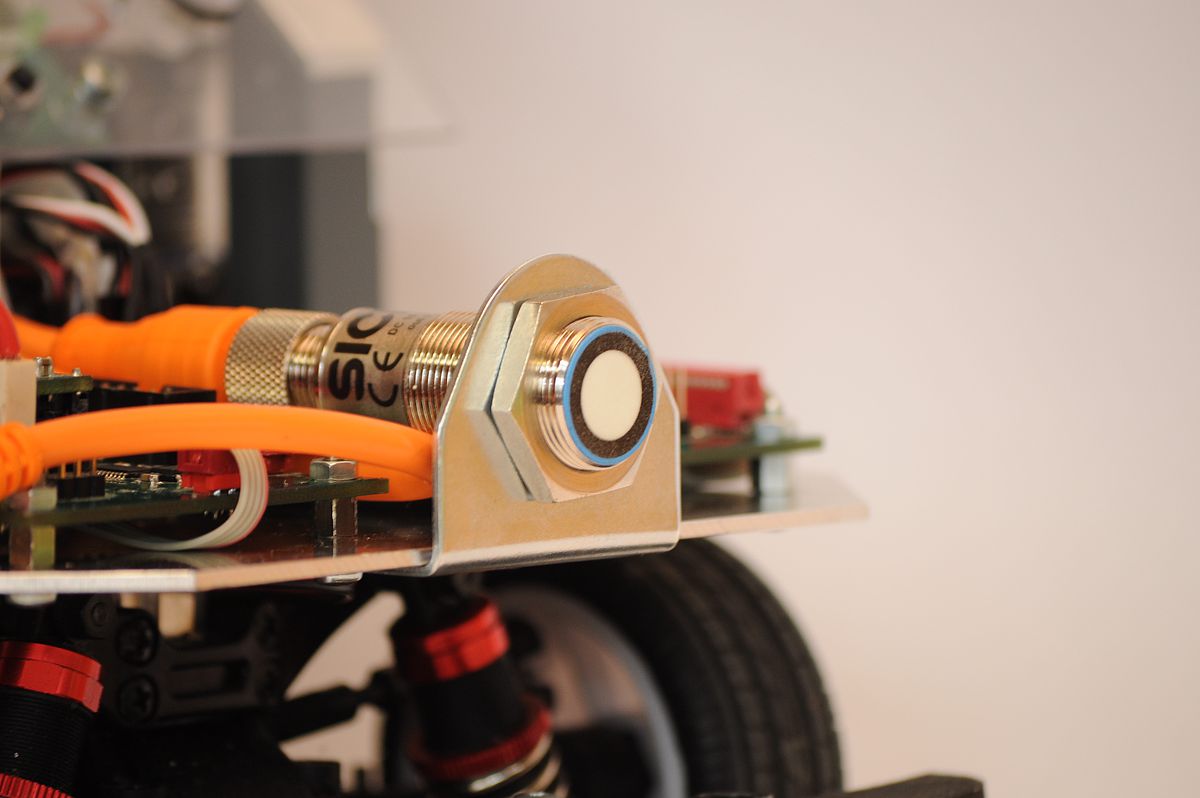
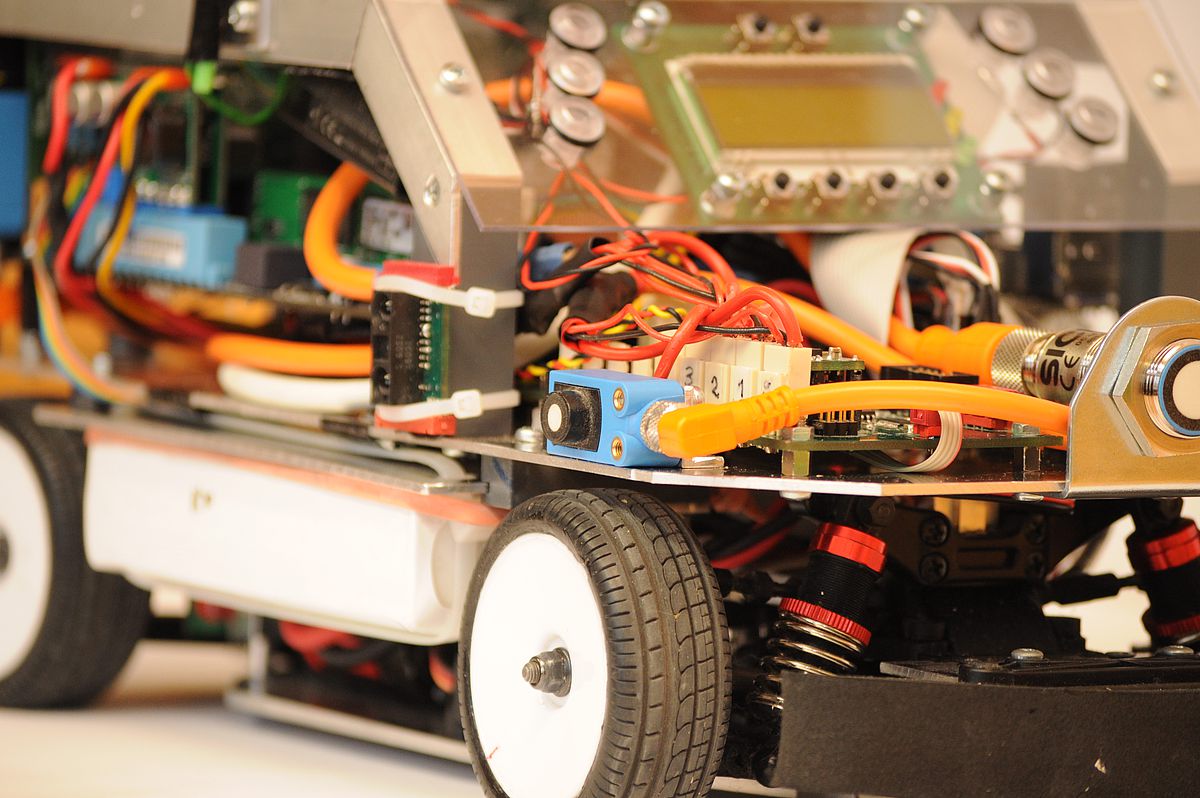
Neue Ultraschallsensoren
In den vergangenen Jahren wurde zur Parklücken- und Hinderniserkennung größtenteils auf Infrarotsensoren zurückgegriffen. Insbesondere deren beschränkte Reichweite führte jedoch immer wieder zu Problemen. Es wurde daher bereits frühzeitig beschlossen, dieses Jahr einen neuen Ansatz in Form von Ultraschallsensoren auszuprobieren.
Es freut uns daher sehr, dass der Sensorhersteller SICK uns mehrere Ultraschallsensoren vom Typ UC4 und UM18 kostenlos zur Verfügung stellt. Während einerseits zwei seitliche Sensoren in Zukunft die Größe der Parklücke detektieren sollen, unterstützen die frontalen Sensoren vom Typ UM18 unsere Tiefenbildkamera bei der Hinderniserkennung.
Die seitlichen Ultraschallsensoren wurden inzwischen eingebaut und ersten Tests unterworfen, die durchaus positiv verliefen. Gerne nehmen wir SICK in die Reihe unserer Sponsoren auf und bedanken uns für die großzügige Spende.
Stefan W., 19.11.2012
Radiobeitrag
Ein kurzer Hinweis für alle Interessierten: Der CCC Ulm hat in seiner 14-tägigen Radiosendung /dev/radio auf Radio free FM am vergangenen Sonntag einen Beitrag über den Carolo-Cup und unser Team ausgestrahlt. Die Aufzeichnung der Sendung kann hier angehört werden.
Patrick, 09.10.2012
Neue Hardware

Der neue Spatz4 wird gegenüber seinem Vorgänger mit stark veränderter Hardware ausgestattet. Die größte Neuerung dürfte dabei das neue Chassis sein. Dieses wurde von uns selbst entwickelt und ermöglicht eine größere Wendigkeit des Fahrzeugs. In Kombination mit teils neuen, teils überarbeiteten Algorithmen erhoffen wir uns eine deutliche Verbesserung der Fahreigenschaften. Besonders unser Einparkkonzept ist davon begünstigt.
Weitere Neuerungen sind neue Sensoren im Frontbereich und der Einsatz einer Grafikkarte, um komplexe Berechnungen parallelisiert durchführen zu können und dabei die CPU zu entlasten.
Patrick, 11.09.2012
Einweihung des Calibration-Tools


Seit dieser Woche ist unser Team im Besitz eines selbst gebastelten Calibration-Tools für dreidimensionale Szenen.
Dieses ermöglicht uns sowohl die VGA-Kamera, als auch die Tiefenbildkamera auf unseren Spatz abzustimmen.
Markante Punkte (wie zum Beispiel die Ecken der Hindernisse im Tiefenbild oder die Kreuzungspunkte eines Schachbrettmusters im Grauwertbild) können aus Bildern extrahiert werden.
Da gleichzeitig die exakte Position dieser Punkte im Raum vermessen wird, haben wir die Möglichkeit die Transformationsmatrizen aufzustellen um Punkte von den Kamera-Koordinatensystemen in das Fahrzeug-Koordinatensystem umzurechnen.
Dadurch erhoffen wir uns eine genaue Aussage über die Position von Objekten im Raum treffen zu können, die aus Bildern detektiert wurden.
Die Anforderungen an dieses Tool sind, dass es leicht transportierbar ist, schnell aufgebaut werden kann, sowie einer gewissen Steifheit unterliegt, damit auch nach mehrmaliger erneuter Kalibrierung die Punkte im 3D Raum die selbe Position einnehmen. Verwirklicht wurde dies durch eine Gitterkonstruktion aus Holz, die zusammengesteckt werden kann.
Über den Verlauf unserer Arbeit werden wir euch natürlich auf dem Laufenden halten.
Marcel, 06.07.2012
Neuer Sponsor: PEAK System
Wir bedanken uns bei PEAK System für die Bereitstellung von zwei PCAN-USB-Adapter für unsere Fahrzeuge!
Patrick, 28.06.2012
Bezug neuer Räumlichkeiten
Nachdem unser Kellerraum seit der Übergabe an unser Team vor nicht ganz einem Jahr aufgrund von Verzögerungen im Aufbau des Spatz verwaist war, sind wir nun mit unserer Teststrecke sowie Analysewerkzeugen umgezogen. Diese Lokation bietet uns dank gleichbleibenden Umwelteinflüssen optimale Testbedingungen. Des Weiteren können nun ganzjährig Messfahrten durchgeführt werden, was aufgrund der Einführung von ADTF vielfältigste Möglichkeiten zur Auswertung bietet.
Philipp, 21.06.2012
In jedem gesunden Körper wohnt ein gesunder Geist

Um unseren Teammitgliedern einen Ausgleich zur täglichen Entwicklungsarbeit am PC anzubieten, hat das Team Spatzenhirn nun einen Lauftreff ins Leben gerufen. Sportlich ambitionierte Teammitglieder treffen sich ab sofort einmal wöchentlich, um gemeinsam zu Laufen, den Kopf freizubekommen und vielleicht auch das ein oder andere ungelöste Problem zu diskutieren.
Philipp, 14.05.2012
Das 2013er Team steht!
Nach kurzer Frühjahrspause hat sich das Team Spatzenhirn neu formiert und die Entwicklungsarbeit am neuen Auto hat begonnen!
Wir begrüßen Stefan Wiehler, Thomas Witte, Matthias Matousek, Stefan Bonfert und Viktor Kessler in unserem Team.
Patrick, 16.04.2012
Nachtrag
Das Team löst sich nun so langsam auf. Einige machen weiter aber viele verlassen auch das Team und neue werden hinzu kommen. Denjenigen die das Team verlassen wünschen wir alles Gute im weiteren Studium und vielen Dank für eine gute Zeit.
In den nächsten Monaten wird sich das neue Team konstituieren und wir werden dies natürlich hier wieder kundtun. So lange gibt es noch ein paar Videos vom Wettkampf 2012.
Zum einen ein weiteres Zeitraffer Video diesmal vom Wettkampf selbst. Am Anfang sieht man, wie sich die Teams zu den Gruppenfotos aufstellen, danach den Rundkurs ohne Hindernisse und die Einparkdisziplin. Am Ende schließlich noch ein paar Teams bei der Hindernisfahrt.
Zum anderen haben wir auch unsere Fahrt ohne Hindernisse und unser Einparkmanöver dokumentiert:
2. Platz!
Ein wunderbares Ergebnis für unser Team und ein absolut verdienter und souveräner Sieg von CDLC aus Braunschweig!
Unser Team konnte in drei der vier Disziplinen den Spitzenplatz erobern doch bei der Königsdisziplin, der Hindernisfahrt, fuhr das Braunschweiger Team außer Konkurrenz. Auch in den anderen drei Wertungen konnte Braunschweig gut abschneiden und sicherte sich so den Sieg.
Wir freuen uns über unser Abschneiden und feiern jetzt noch mit den anderen Teams einen gelungenen Wettkampf.
Wettkampftag
Heute wird’s ernst. Nachdem gestern noch fleißig und bis spät in die Nacht entwickelt wurde, ist heute der Tag gekommen, an dem wir nun zeigen können, was wir erreicht haben.
Gestern war nochmal Training angesagt. Wie man sich das vorstellen kann, zeigt unser Timelapse-Video, das einen großen Teil unserer Arbeit am gestrigen Tag zeigt.
Angekommen in Braunschweig
So, wir sind da!

Das Spatzennest
Ein kleines HDR-Bild von unserer Arbeitsumgebung im Institut für Mess-, Regel- und Mikrotechnik an der Uni Ulm:

Vielen Dank an Sven für das tolle Bild.


